Pushing the Frontiers of Subexponential FPT Time for Feedback Vertex Set
 Marin Bougeret
Daniel Gonçalves
Jean-Florent Raymond
Marin Bougeret
Daniel Gonçalves
Jean-Florent Raymond
Abstract
The paper deals with the Feedback Vertex Set problem parameterized by the solution size. Given a graph and a parameter , one has to decide if there is a set of at most vertices such that is acyclic. Assuming the Exponential Time Hypothesis, it is known that FVS cannot be solved in time in general graphs. To overcome this, many recent results considered FVS restricted to particular intersection graph classes and provided such algorithms.
In this paper we provide generic conditions on a graph class for the existence of an algorithm solving FVS in subexponential FPT time, i.e. time , for some , where denotes the number of vertices of the instance and the parameter. On the one hand this result unifies algorithms that have been proposed over the years for several graph classes such as planar graphs, map graphs, unit-disk graphs, pseudo-disk graphs, and string graphs of bounded edge-degree. On the other hand it extends the tractability horizon of FVS to new classes that are not amenable to previously used techniques, in particular intersection graphs of “thin” objects like segment graphs or more generally -string graphs.
Keywords and phrases:
Subexponential FPT algorithms, geometric intersection graphsCategory:
Track A: Algorithms, Complexity and GamesCopyright and License:
2012 ACM Subject Classification:
Mathematics of computing Graph algorithms ; Theory of computation Fixed parameter tractability ; Theory of computation Computational geometryEditors:
Keren Censor-Hillel, Fabrizio Grandoni, Joël Ouaknine, and Gabriele PuppisSeries and Publisher:
1 Introduction
1.1 Context
Given an -vertex graph and a parameter , the Feedback Vertex Set problem (FVS for short) asks whether there exists a set of at most vertices such that has no cycle. This is a fundamental decision problem in graph theory and one of Karp’s 21 NP-complete problems. Because of its hardness in a classical setting, the problem has been widely studied within the realm of parameterized complexity. This line of research aims to investigate the existence of FPT algorithms, i.e., algorithms that run in time , for some computable function . Such algorithms provide a fine-grained understanding on the time complexity of a problem and describe regions of the input space where the problem can be solved in polynomial time. Note that it is crucial here to obtain good bounds on the function since the (potentially) super-polynomial part of the running time is confined in the term. In this direction it was proved that under the Exponential Time Hypothesis of Impagliazzo, Paturi and Zane, FVS does not admit an algorithm with running time (see [11]). Nevertheless certain classes of graphs (typically planar graphs) have been shown to admit algorithms with running times of the form (for some ), i.e., where the contribution of the parameter is subexponential. Such algorithms are called subexponential parameterized algorithms and they are the topic of this paper. Given the numerous existing results on this theme, there are two main directions of research: to improve the running times in the classes where an algorithm is already known, or to extend the tractability horizon of FVS by providing more general settings where subexponential FPT algorithms exist. We are here interested by the second direction, that can be summarized by the following question.
Question 1.
What are the most general graph classes where FVS admits a subexponential parameterized algorithm?
Historically, a primary source of graph classes studied to make progress on the above question was geometric intersection graphs. In an intersection graph, each vertex corresponds to a subset of some ambient space, and two vertices are adjacent if and only if the subsets intersect. Taking the Euclidean plane as the ambient space, many graph classes can been defined by setting restrictions on the subsets used to represent the vertices. One can for instance consider intersection graphs of disks in the plane, or segments, or Jordan arcs111In the following, those are called strings.. With such subsets, one defines the class of disk graphs, segment graphs, and string graphs respectively. It is also often the case that there are conditions dealing with all the subsets representing the vertices of a given graph. For example, if we consider disks (resp. segments) one can ask those to have the same diameter (resp. to use at most different slopes), and this defines the class of unit disk graphs (resp. -DIR graphs). When considering strings, one possible property is that any string has at most points shared with the other considered strings. This defines string graphs with edge degree at most . A weaker condition is to ask every pair of the considered strings to intersect on at most points, this defines -string graphs. This class generalizes several natural classes such as planar graphs, map graphs, unit-disk graphs, segment graphs, string graphs of bounded edge-degree, and intersection graphs of -convex bodies that exclude a fixed subgraph (see [25, 18, 3]).
For all these graph classes, FVS is NP-complete, and actually under ETH none of them admits a -time algorithm. Indeed, this lower bound was given in [12] for induced grid graphs, which form a subclass of unit disk graphs and -DIR graphs. On the other hand for each of the aforementioned classes there is an algorithm solving FVS in subexponential time. More precisely, this algorithm applies to any string graph and runs in time [9].222The notation ignores polylogarithmic factors, i.e. we write if for some we have . Regarding subexponential parameterized algorithms, the case of unit disk graphs was settled with an algorithm whose running time matches the ETH lower bound [2]. This result uses the fact that these graphs admit vertex partitions into cliques such that each of these cliques is adjacent to only a constant number of the other cliques. Such a property does not hold for the other graph classes mentioned above. However, other techniques have been developed to deal with the other aforementioned classes such as the classes of bounded edge degree string graphs [3], contact-segment and square graphs [5], disk graphs [21, 1], or the pseudo-disk graphs [4]. Note that when dealing with classes of intersection graphs, the representation of the input (if known) could be used by the algorithm. Some of these algorithms are robust, meaning that the input graph is provided using one of the classical graph data structures, where there is no indication of the intersection model of . Because the recognition problem is difficult for most of the classes discussed above, robustness is a substantial advantage.
1.2 Our contribution
Toward answering 1, in the same spirit as in [23], which introduces a generic setting where certain hitting problems can be solved in subexponential parameterized time, we identify sufficient conditions for a graph class (then said to be nice) to admit a subexponential parameterized algorithm for FVS. As we will see later these conditions are satisfied by several natural graph classes, some of which were not known to admit a subexponential parameterized algorithm prior to this work.
Let us now provide some intuition behind the conditions we require for a nice graph class. We discuss here the similarities between these conditions and classical studied properties, while the reasons why these conditions help to get a subexponential parameterized algorithm for FVS are examined in Section 2. A starting point is to review known results about the class of string graphs, which constitutes a good candidate to answer the previous question. In particular, the following results are known for string graphs. For a graph , let us say that a graph is -free if it does not contain as subgraph.
Theorem 3 ([20]).
There exists a constant such that for it holds that every -free string graph on vertices has at most edges.
These results333Note that an error was found in the proof of the above results in [20], but a claim by the author was made that the proof can be corrected in the case of string graphs (see [10]). Moreover the earlier bound in [24] yields similar results, up to logarithmic factors. are interesting in our case, as a simple folklore branching allows us to reduce the problem to the case where the instance of FVS is -free for . Thus, among the conditions required for a graph class to be nice, two of them correspond to a relaxed version of the above theorems.
Our last main condition is related to neighborhood complexity. A graph class has linear neighborhood complexity (with ratio ) if for any graph and any , . It is known that bounded-expansion graph classes have linear neighborhood complexity [26] as well as bounded twin-width graphs [8]. In previous work on parameterized subexponential algorithms [22, 1, 4, 5], it appeared useful that the considered graphs have the property that, if is -free (or even -free), then for any , . Notice that this is slightly stronger than requiring that a class that is -free (or -free) for a fixed has linear neighborhood complexity, as it is important for our purpose that the dependency in is polynomial. We point out that -free string graphs have bounded-expansion, hence linear neighborhood complexity, however this does not imply that the dependency in is polynomial. Thus, our last main condition (called bounded tree neighborhood complexity) can be seen as a slightly stronger version of this “polynomially dependent” neighborhood complexity. Let us now proceed to the formal definitions.
Definition 4.
We say that a graph class has bounded tree neighborhood complexity (with parameters ) if there exist an integer and two polynomial functions such that the following conditions hold. For every , every -free graph , every set and every family of disjoint non-adjacent444Two vertex subsets are non-adjacent in a graph if there is no edge from one to the other, see Subsection 1.3. vertex subsets of , each inducing a tree:
-
, where denotes the neighbors of the vertices of in , and
-
, where and denote the maximum over all of and respectively.
Definition 5.
An hereditary graph class is nice (for parameters ) if all the following conditions hold:
-
C1.
is stable by is stable by contraction of an edge between degree-two vertices that do not belong to a triangle.
-
C2.
has bounded tree neighborhood complexity (for some parameters ).
-
C3.
There exist and a constant that depends polynomially in such that for any -free graph , .
-
C4.
There is a constant that depends polynomially in such that for any -free graph , . Without loss of generality we will assume .
Our main result is the following.
Main Theorem.
For every nice hereditary graph class there is a constant such that FVS can be solved in in time .
Actually we provide a single generic algorithm for all nice classes (which requires the values of , but not and ). The techniques used to prove the above result are discussed in Section 2. For the time being, let us focus on consequences. As hinted above, being nice is a natural property shared by several well-studied classes of graphs. In particular we show that it is the case for -string graphs and pseudo-disk graphs, hence we have the following applications.
Corollary 6.
There exists , such that for all there is a robust parameterized subexponential algorithm solving FVS in time for -vertex -string graphs.
Corollary 7.
There exists , such that there is a robust parameterized subexponential algorithm solving FVS in time for -vertex pseudo-disk graphs.
Observe that the two corollaries above encompass a wide range of classes of geometric intersection graphs for which subexponential parameterized algorithms have been given in previous works such as planar graphs, map graphs, unit-disk graphs, disk graphs, or more generally pseudo-disk graphs, and string graphs of bounded edge-degree. In this sense our main result unifies the previous algorithms.
Also, it captures new natural classes such as segment graphs, or more generally -string graphs, where previous tools were not sufficient (as discussed in Section 2). We point out that before this work, the existence of subexponential parameterized algorithm for FVS was open even for the very restricted class of -DIR graphs.
Generality has a cost and the running time bound we obtain for pseudo-disk graphs is worst than the one obtained in [4], which heavily relied on the input pseudo-disk representation. On the other hand our algorithm has the extra property of being robust (i.e., it does not require a geometric representation) which is a relevant advantage for those classes of intersection graphs where computing a representation is difficult.
1.3 Basic notations and organisation of the paper
In this paper logarithms are binary and all graphs are non-oriented and simple. Unless otherwise specified we use standard graph theory terminology, as in [13] for instance. For a graph , and , we denote the neighbors of . We omit the subscript when it is clear from the context. For , we use the notation and denote the subgraph induced by on . For and , we denote and for we denote , with the additional notation . For a graph we say that is -free if is not a subgraph of . Two disjoint vertex subsets or subgraphs of a graph are said to be non-adjacent (in ) if there is no edge in with one endpoint in and the other in .
Organisation
In Section 2 we explain why the approaches developed for other intersection graph classes (mainly in the papers [1, 3, 4, 21]) do not apply here and present the main ideas behind our algorithm. The presentation uses a case study where we are given a small set such that is a forest of paths. This simplifies the arguments but is complex enough to justify the restrictions we put on the classes we consider. In Section 3 we provide applications of our main theorem by showing in particular that -string graphs are nice. Finally, in Section 4 we discuss open problems and possible extensions of the approach developed here. Due to space constraints, the description of the algorithm in the general case and its analysis can be found in the full version of the paper.
2 Our techniques
2.1 Why bidimensionality fails and differences with classes of “fat” objects
Even if our goal is to abstract from a specific graph class, let us consider in this section the class of -DIR graphs, corresponding to the intersection graphs of vertical or horizontal segments in the plane. As these objects are non “fat”555A connected regions of the plane is said to be -fat if the radius of smallest disk enclosing is at most times larger than the radius of the largest disk enclosed in . A family of regions of the plane is then said to be fat if there exists such that all the elements of the family are -fat. and can cross (unlike pseudo-disks), this class constitutes a good candidate to exemplify the difficulties.
A common approach is as follows. Given an instance of FVS, we compute first in polynomial time a -approximation, implying that we either detect a no-instance, or define a set with and such that is a forest. The goal is then to reduce, using kernelization or subexponential branching rules, to equivalent instances with small treewidth, that is . As FVS can be solved in using a classical dynamic programming approach, we get a subexponential parameterized algorithm. Thus, one has to find a way to destroy in the obstructions preventing a small treewidth. A first type of obstructions is and , which are easy to handle as there are folklore subexponential branchings when . Now, one can see the hard part as destroying hidden (as a minor for example) (see Figure 1).
A point that seems crucial to us is the following. In intersection graphs of “fat objects” (like disks, squares, or pseudo-disks more generally), the “locally non planar structure” when an object (vertex in Figure 1) is “traversed” (by , in Figure 1) comes to the price of an edge () in the neighborhood of . Thus, the presence of a large as a minor implies that a large matching (of size ) will appear in the neighborhood of a vertex . However, as (called a triangle bundle in [22]) contains triangles pairwise intersecting on exactly one vertex , the set is a good structure to perform a subexponential branching for FVS. Indeed, [21] proposed a “virtual branching” to handle this structure by either taking in the solution, or absorbing in , implying then that the parameter virtually decreases by as a solution which does not contain has to hit all these edges, even if we cannot branch to determine which are exactly the vertices in the solution.
Once no more virtual branching is possible on large triangle bundles, they obtain by some additional specialized techniques that any vertex in is such that is an independent set. Then, it is proved ([21], Corollary 1.1) that in a disk graph where for any , is an independent set, and where there does not exist a vertex in whose neighborhood is contained in , then , where denotes the maximum size of a clique in . This no longer holds for -DIR graphs: the family of pairs depicted on the right of Figure 1 is indeed a counter example as they respect the conditions, have , but .
More generally, the role of the size of a matching in the neighborhood was studied in [5] which shows how subexponential parameterized algorithms can be obtained for graph classes having the “almost square grid minor property” (ASQGM), corresponding informally666In the correct definition is replaced by a slightly more technical parameter. to where is the maximum size of a matching in a neighborhood of a vertex, and is the largest size of a grid contained as a minor in . The previous counter example shows that -DIR does not have the ASQGM property, implying that we need another approach to handle them.
2.2 A simpler case study: when trees are only paths
To simplify the arguments, but still understand why properties in 5 of a nice graph class are needed, let us assume that the forest only contains paths , and use the example of segment graphs. This case remains challenging as a large can still be hidden as a minor (as in Figure 1), and we need to destroy it in order to reduce the treewidth of the graph. To keep notations simple, we use the notation to denote a polynomial dependency on the parameter, and thus we do not try to compute tight formulas depending on the polynomial given in the definition of a nice class. We assume that we performed folklore branching and that we are left with a -free graph for . It is known for string graphs (and thus segment graphs) that in this case (corresponding to item 3 of the definition of nice). Thus, our goal is to reduce to for some .
A first obvious rule is to iteratively contract edges of whose endpoints have no neighbors in . This explains why we need the property of item 1 of the definition of nice.
Let us now explain how the property of item 2 (bounded tree neighborhood complexity, abbreviated bounded T-NC) allows to obtain the following “degree-related size property”: for any subpath of a , . Define an independent set of size by picking every second vertex in . According to the definition of bounded T-NC (item) with , we get . Thus, if , we found vertices in having the same neighborhood in , and thus a vertex adjacent to vertices in . If is large enough (about ), it is always better to take any arbitrary vertex . This leads to a kernelization rule (denoted (KR5) in the full version): if there is a vertex adjacent to approximately vertices in a subpath , delete and decrease by one. To sum it up, after applying this rule, for any subpath of a , if we have , then .
Before the next step we need to apply the following “large degree rule” (denoted (KR3) in the full version): if there is a vertex in a such that , then add to . One can prove that by taking , with the constant defined in item 4 of the definition of a nice class, does not grow too much after applying this rule exhaustively: by denoting the set of vertices already in before applying this rule, we always have . This claim will be discussed in Subsection 2.3.
Observe that at this stage we may still have a large as minor, with for example graphs as in Figure 1 where no rule applies. It remains to define a crucial rule to destroy these minors. Let us now present a partitioning algorithm of the connected components in . For any connected component in , we start (see Figure 2) from an endpoint of and collect greedily vertices until we find a subpath such that , or that there is no more vertices in . If , then restart a new path starting from the next vertex to create , and so on. This defines a partition , where for any and no lower bound for . As we applied the large degree rule, we also know that for any , because collecting at each step a new vertex in the path can increase by at most . This implies, using the degree-related size property introduced above, that for any . Let us denote the set of such that the “large-degree subpaths”. Observe that the last considered subpath of each connected component (on the right of each path of in Figure 2) may have as there was no more vertices to complete it, hence it is not contained in . We denote those remaining “small-degree subpaths”.
Let us now explain how the bounded T-NC property (item) allows to obtain the following “small number of large-degree subpaths” property. By removing half of the ’s, we can get a set of non-adjacent trees (meaning with no edge between the ) such that . We can then apply the T-NC property with , and to obtain . Thus, if , we found large-degree subpaths (denoted ) having the same neighborhood in with . By choosing and considering with , we found a structure that we call a (see Figure 3), formally defined as a pair where
-
(P1)
has size ,
-
(P2)
a family of vertex-disjoint non-adjacent subtrees (paths here) of such that for all , , and
-
(P3)
for any , .
Now, inspired by the “virtual branching rule” for a triangle bundle, we introduce a branching rule (denoted (BR2) in the full version) that either deletes almost all vertices in , or is adding to a subset of of the . The complexity behind this rule is fine as in the second branch, the parameter virtually decreases by , and grows by . This explains how we deal with the -minors.
These rules do not suffice to bound . Recall that any is such that , and thus we only need to bound . As we cannot apply the previous rule, we know that the number of big paths is small: . Now, to bound , observe that we can partition , where
-
is the set of small-degree paths for some (belonging to the same path than a large-degree path ).
-
is the set of small-degree paths which are entire connected components of .
As , it only remains to bound . Now, we can exploit once again the bounded T-NC property (item) to obtain that, if , then we can find disjoint non-adjacent paths in having the same neighborhood in . This case is different from the case as may be arbitrarily small (we only know that ), and thus unlike this does not decrease the parameter by a large amount. However, in this case, paths of are just connected components of , and we use a last rule (denoted KR4 in the full version) that identifies paths that can be safely removed. It can be shown that if paths have the same neighborhood in , of size , one of the paths is redundant. Hence after applying the rule exhaustively we can assume .
This concludes the sketch of proof for this restricted setting where the connected components of are paths, as we obtain by taking small enough as required.
2.3 Challenges to lift the result from paths to trees
We now consider the real setting where given where is -free for , and given a feedback vertex set of size at most , we want to reduce the graph to obtain . The approach still consists in partitioning in an appropriate way (called a -uniform partition).
A first problem when trying to adapt the approach of Subsection 2.2 is the degree-related size property. Indeed, for trees we are now only able to obtain that for any subtree of , where and is the size of the “border of ”. Observe that is at most for any subpath of path , whereas can only be bounded by for a subtree . Informally, in the path case was only polynomially dependent on , and now is also polynomially depends on .
A second problem is the large degree rule. Suppose that this rule no longer applies (meaning that for every , we have ), and suppose now that because of another rule a vertex is added to , denoting . Then this can create a new large degree vertex with (and so ). Then would need to be added and the problem may arise again for another vertex . This “cascading” can easily be prevented if is a forest of paths: it suffices to apply the rule a first time at the start of the algorithm, but with . We then have for each the bound , and we do not need to apply the rule again after as adding vertices to may increase by at most ensuring the wanted bound for . However, in the case of a tree, we can have in a vertex of arbitrarily large degree, so we cannot apply the same solution. The problem is treated with the help of a technical lemma which ensures that throughout the execution of the algorithm we keep .
Finally, a third problem is the definition of the partition. As in the case of paths we want to partition into a “-uniform partition” , where in particular we have , and for any , and . The greedy approach presented for the case of paths is now more involved, as we have to cut each tree of into subtrees that have small border , as otherwise the previous bound becomes useless when is too large.
This partitioning procedure can either:
-
Fail and find a subtree with , for some constant , implying that our degree-related size rule can be applied.
-
Fail and find too many subtree with large degree, implying that we found a , and that our rule can be applied.
-
Produce a -uniform partition with .
In the third case, we either find another way to apply one more time a reduction rule, or prove that .
2.4 An important tool to prove that an intersection graph class is nice
We believe that one important application of our main theorem is the class of -string graphs (recall that segment graphs are a subclass of -string graphs). To prove that -string graphs is a nice class (and thus captured by our result), one needs to prove that -string graphs have a bounded tree neighborhood complexity. This property is not straightforward, and we would like to point out the following theorem which seems useful to obtain results related to neighborhood complexity.
Theorem 8 ([16]).
Given a family of pseudo-disks and a finite family of pseudo-disks, consider the hypergraph whose vertices are the pseudo-disks in and the edges are all subsets of of the form , with . Then the number of edges of cardinality at most in is .
A very important aspect in this result is that it is not required that is a family of pseudo-disks, and thus pseudo-disks of may “cross” pseudo disks of . This is indeed the case in our application where in particular we associate to each tree in a pseudo-disk in , and this pseudo disk may cross pseudo-disks associated to vertices of (see proof of 11).
3 Applications
In this section, we prove that -string graphs and pseudo-disk graphs are nice graph classes for some parameters. We recall that a system of pseudo-disks is a collection of regions in the plane homeomorphic to a disk such that any two of them share at most 2 points of their boundary. Similar arguments are used for both considered classes, but in the case of pseudo-disks the arguments are a bit simpler, we then consider this class in first.
3.1 Application to pseudo-disk graphs
In this section, we prove that the class of pseudo-disk graphs is nice, and so by our main theorem it admits a robust subexponential FPT algorithm for FVS. Note that for this graph class, the existence of such algorithm was already known [4].
Lemma 9.
There exists a constant such that the class of pseudo-disk graphs has bounded tree neighborhood complexity with parameters and .
Proof.
Let , be a -free pseudo-disk graph, a representation of as pseudo-disks, , and a family of disjoint non-adjacent trees of . We would like to apply Theorem 8 on the set and the family of subsets of the plane obtained by taking for each tree the union . Because we are considering pseudo-disks and trees, this union is homeomorphic to a disk. Moreover as the trees are non-adjacent the obtained unions do not intersect each other, and so are a pseudo-disk system trivially. Now applying Theorem 8 with the families and directly gives that there exists a constant such that if for all we have then as wanted for the second bound. Observing that we can take as an upper bound for with gives the first wanted bound.
Lemma 10.
There exist constants such that the class of pseudo-disk graphs is a nice class with parameters , , and .
Proof.
Most of the conditions were already stated with Theorem 2, Theorem 3 and 9. The only property that remains to check is that in a pseudo-disk graph , identifying adjacent degree-two vertices and obtaining a new vertex preserves being a pseudo-disk graph. We may assume that the vertices do not have a common neighbor as otherwise we obtain an induced subgraph of which is trivially a pseudo-disk graph. By considering a pseudo-disk representation of , we can take as it is homeomorphic to a disk and its boundary will cross the second neighbor of (respectively ) as many time than the boundary of (respectively ). And so applying our main theorem we obtain: See 7 Note that our main theorem gives that it suffices to take for the result to hold. Sharper results already exist in the literature for pseudo-disk graphs, by generalizing the robust algorithm of [21] dealing with disk graphs to pseudo-disk graphs, or by using the representation as pseudo-disks for obtaining an even better running time. See [6], the full version of [4] for both methods.
3.2 Application to -string graphs
We now show how to adapt the arguments from the previous section to the case of -strings.
Lemma 11.
There exist constants such that the class of -string graphs has bounded tree neighborhood complexity with parameter and .
Proof.
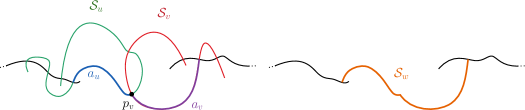
The proof is very similar to the proof of 9 with some additional tweaks. Let be a -free -string graph for some and be an -string representation of . For , again we consider the region . In this case however, even so is a tree, the complement of this region is not necessarily connected (for example if two strings of intersect on several points). In order to obtain a region of the plane homeomorphic to a disk, we modify by cutting small sections where no intersections take place (not even with a string of ) and obtain a new set that is connected and such that there is exactly one arc-connected region in and which intersects the same strings in as (see Figure 4). Moreover we add a small thickness to while preserving the wanted property about the number of regions in in order to obtain a geometric shape homeomorphic to a disk. Observe that as there are no edges between vertices of distinct members of , by taking the thickness small enough the connected sets of the form (for ) are not crossing and so they trivially form a system of pseudo-disks.
Now we would like to construct another system of pseudo-disks representing the vertices of . We do this by cutting the strings in whenever two of them cross each other. Observe that by Theorem 3 there exists a constant such that by denoting we have at most intersecting pairs, and remember that each pair intersects each other at most times as we consider a -string representation. So we have at most cuts which gives an upper bound of for the number of sections of strings between intersection points. We denote the set of such sections. Again we define a family by considering the sections (which are disjoint by construction) and giving them some thickness, while preventing the sections to intersect each other. This is clearly a system of pseudo-disks as its elements are disjoint. By Theorem 8, the number of distinct sets , for , is where is the maximum, over every , of the number of pseudo-disks in crossed by . This upper bound gives the second result of this lemma by observing that if a pair of pseudo-disks intersect exactly the same set of , then . We obtain the first result of the lemma by using the trivial bound .
Lemma 12.
There exist constants such that for every the class of -string graphs is a nice class with parameters , , and .
Proof.
Again most of the conditions were already stated with Theorem 2, Theorem 3 and 11. The only remaining property to prove is that given an -string graph , identifying adjacent degree-two vertices and preserves being a -string graph. We may assume that and do not have a common neighbor as otherwise the obtained graph is an induced subgraph of and so is a -string graph. We do this by replacing in a -string representation of the strings and with a new string while preserving the global property of being an -string family. contains a Jordan arc linking its two neighbors, without being intersected by any string in its interior. Let denote the extremity of in . Then contains a Jordan arc linking to the string representing its second neighbor, without being intersected by any other string than . The string is then obtained by taking the union of and . This construction ensures that the number of crossings between two strings other than and of the initial representation remain the same. We now have to bound the number of crossing of with others strings. Recalling that and do not share a common neighbor, and that by construction has crossings (one for each distinct neighbor), does not have more than crossings with another string. So after replacing and by we still have a -string family.
And so applying our main theorem we obtain: See 6 More precisely, we can take .
4 Conclusion
In this paper we gave general sufficient conditions for the existence of subexponential parameterized algorithms for the Feedback Vertex Set problem. Our main theorem unifies the previously known results on several classes of graphs such as planar graphs, map graphs777Map graphs are intersection graphs of interior-disjoint regions of homeomorphic to disks., unit-disk graphs, disk graphs, or more generally pseudo-disk graphs888Pseudo-disk graphs are intersection graphs of a collection of regions in the plane homeomorphic to a disk such that any two of them share at most 2 points of their boundary, and string graphs of bounded edge-degree. It also applies to classes where such algorithms were not known to exist, notably intersection graphs of thin objects such as segment graphs and more generally -string graphs.
However, we have so far no evidence that our concept of nice class could be an answer to 1. So a natural direction for future research would be to investigate more general graph classes than those listed above or to discover new classes that fit in our framework. There are two natural candidates:
-
Intersection graphs of objects in higher dimensions. However, as proved in [15], under ETH intersection graphs of unit balls in do not admit a subexponential parameterized algorithm for FVS.
-
Graph classes excluding an induced minor.999A graph is said to be an induced minor of a graph if it can be obtained from by deleting vertices and contracting edges. Otherwise, is said to exclude as induced minor or to be -induced minor free. This is more general than string graphs (which exclude a subdivided as an induced minor). In such classes, Korhonen and Lokshtanov [17] recently provided an algorithm solving FVS in time , that is, subexponential in the input size .
Less general than the previous item is the class of string graphs, which is nevertheless the most general class of intersection graphs of (arc-connected) objects in the Euclidean plane. At the time of the writing, it is not excluded that it could be a nice class. So far, we are still missing the property about the bounded tree neighborhood complexity. Note that in our proof for -strings, the bound on the number of crossing is only used to prove that the class satisfies this property of bounded tree neighborhood complexity. Obtaining a similar result without using the bound on the number of crossings would thus yield the desired generalization. But an even simpler way could be to prove that the general case of string graphs can be reduced to the case of -strings graphs for some “small” function of the problem parameter . A first idea would be to prove that -free string graphs are -string graphs for some constant , however this fails as there are string graphs with vertices, and so which are -free, that require crossings for some constant [19].
References
- [1] Shinwoo An, Kyungjin Cho, and Eunjin Oh. Faster algorithms for cycle hitting problems on disk graphs. In Algorithms and Data Structures: 18th International Symposium, WADS 2023, Montreal, QC, Canada, July 31 – August 2, 2023, Proceedings, pages 29–42, Berlin, Heidelberg, 2023. Springer-Verlag. doi:10.1007/978-3-031-38906-1_3.
- [2] Shinwoo An and Eunjin Oh. Feedback Vertex Set on Geometric Intersection Graphs. In Hee-Kap Ahn and Kunihiko Sadakane, editors, 32nd International Symposium on Algorithms and Computation (ISAAC 2021), volume 212 of Leibniz International Proceedings in Informatics (LIPIcs), pages 47:1–47:12, Dagstuhl, Germany, 2021. Schloss Dagstuhl – Leibniz-Zentrum für Informatik. doi:10.4230/LIPIcs.ISAAC.2021.47.
- [3] Julien Baste and Dimitrios M Thilikos. Contraction bidimensionality of geometric intersection graphs. Algorithmica, 84(2):510–531, 2022. doi:10.1007/S00453-021-00912-W.
- [4] Gaétan Berthe, Marin Bougeret, Daniel Gonçalves, and Jean-Florent Raymond. Feedback Vertex Set for pseudo-disk graphs in subexponential FPT time. In Daniel Kráľ and Martin Milanič, editors, Graph-Theoretic Concepts in Computer Science, pages 65–78, Cham, 2025. Springer Nature Switzerland.
- [5] Gaétan Berthe, Marin Bougeret, Daniel Gonçalves, and Jean-Florent Raymond. Subexponential Algorithms in Geometric Graphs via the Subquadratic Grid Minor Property: The Role of Local Radius. In Hans L. Bodlaender, editor, 19th Scandinavian Symposium and Workshops on Algorithm Theory (SWAT 2024), volume 294 of Leibniz International Proceedings in Informatics (LIPIcs), pages 11:1–11:18, Dagstuhl, Germany, 2024. Schloss Dagstuhl – Leibniz-Zentrum für Informatik. doi:10.4230/LIPIcs.SWAT.2024.11.
- [6] Gaétan Berthe, Marin Bougeret, Daniel Gonçalves, and Jean-Florent Raymond. Feedback vertex set for pseudo-disk graphs in subexponential fpt time, 2024. doi:10.48550/arXiv.2410.23878.
- [7] Gaétan Berthe, Marin Bougeret, Daniel Gonçalves, and Jean-Florent Raymond. Pushing the frontiers of subexponential fpt time for feedback vertex set, 2025. arXiv:2504.17708.
- [8] Édouard Bonnet, Florent Foucaud, Tuomo Lehtilä, and Aline Parreau. Neighbourhood complexity of graphs of bounded twin-width. European Journal of Combinatorics, 115:103772, 2024. doi:10.1016/J.EJC.2023.103772.
- [9] Édouard Bonnet and Paweł Rzążewski. Optimality program in segment and string graphs. Algorithmica, 81:3047–3073, 2019. doi:10.1007/S00453-019-00568-7.
- [10] Edouard Bonnet and Paweł Rzążewski. An -approximation algorithm for vertex cover on string graphs, 2024. doi:10.48550/arXiv.2409.18820.
- [11] Marek Cygan, Fedor V. Fomin, Lukasz Kowalik, Daniel Lokshtanov, Daniel Marx, Marcin Pilipczuk, Michal Pilipczuk, and Saket Saurabh. Parameterized Algorithms. Springer Publishing Company, Incorporated, 1st edition, 2015.
- [12] Mark de Berg, Hans L. Bodlaender, Sándor Kisfaludi-Bak, Dániel Marx, and Tom C. van der Zanden. A framework for exponential-time-hypothesis–tight algorithms and lower bounds in geometric intersection graphs. SIAM Journal on Computing, 49(6):1291–1331, 2020. doi:10.1137/20M1320870.
- [13] Reinhard Diestel. Graph theory 3rd ed. Graduate texts in mathematics, 173(33):12, 2005.
- [14] Zdeněk Dvořák and Sergey Norin. Treewidth of graphs with balanced separations. Journal of Combinatorial Theory, Series B, 137:137–144, 2019. doi:10.1016/j.jctb.2018.12.007.
- [15] Fedor V Fomin, Daniel Lokshtanov, and Saket Saurabh. Excluded grid minors and efficient polynomial-time approximation schemes. Journal of the ACM (JACM), 65(2):1–44, 2018. doi:10.1145/3154833.
- [16] Balázs Keszegh. Coloring intersection hypergraphs of pseudo-disks. Discret. Comput. Geom., 64(3):942–964, 2020. doi:10.1007/S00454-019-00142-6.
- [17] Tuukka Korhonen and Daniel Lokshtanov. Induced-minor-free graphs: Separator theorem, subexponential algorithms, and improved hardness of recognition. In Proceedings of the 2022 Annual ACM-SIAM Symposium on Discrete Algorithms (SODA). SIAM, 2024.
- [18] Jan Kratochvíl and Jirí Matousek. Intersection graphs of segments. Journal of Combinatorial Theory, Series B, 62(2):289–315, 1994. doi:10.1006/JCTB.1994.1071.
- [19] Jan Kratochvíl and Jiří Matoušek. String graphs requiring exponential representations. Journal of Combinatorial Theory, Series B, 53(1):1–4, 1991. doi:10.1016/0095-8956(91)90050-T.
- [20] James R. Lee. Separators in Region Intersection Graphs. In Christos H. Papadimitriou, editor, 8th Innovations in Theoretical Computer Science Conference (ITCS 2017), volume 67 of Leibniz International Proceedings in Informatics (LIPIcs), pages 1:1–1:8, Dagstuhl, Germany, 2017. Schloss Dagstuhl – Leibniz-Zentrum für Informatik. doi:10.4230/LIPIcs.ITCS.2017.1.
- [21] Daniel Lokshtanov, Fahad Panolan, Saket Saurabh, Jie Xue, and Meirav Zehavi. Subexponential parameterized algorithms on disk graphs (extended abstract). In Proceedings of the 2022 Annual ACM-SIAM Symposium on Discrete Algorithms (SODA), pages 2005–2031. SIAM, 2022. doi:10.1137/1.9781611977073.80.
- [22] Daniel Lokshtanov, Fahad Panolan, Saket Saurabh, Jie Xue, and Meirav Zehavi. A framework for approximation schemes on disk graphs. In Nikhil Bansal and Viswanath Nagarajan, editors, Proceedings of the 2023 ACM-SIAM Symposium on Discrete Algorithms, SODA 2023, Florence, Italy, January 22-25, 2023, pages 2228–2241. SIAM, 2023. doi:10.1137/1.9781611977554.CH84.
- [23] Daniel Lokshtanov, Fahad Panolan, Saket Saurabh, Jie Xue, and Meirav Zehavi. Subexponential parameterized algorithms for hitting subgraphs. arXiv preprint arXiv:2409.04786, 2024. doi:10.48550/arXiv.2409.04786.
- [24] Jirí Matousek. Near-optimal separators in string graphs. Comb. Probab. Comput., 23(1):135–139, 2014. doi:10.1017/S0963548313000400.
- [25] Jiří Matoušek. String graphs and separators. In Geometry, structure and randomness in combinatorics, pages 61–97. Springer, 2014. doi:10.1007/978-88-7642-525-7_5.
- [26] Felix Reidl, Fernando Sánchez Villaamil, and Konstantinos Stavropoulos. Characterising bounded expansion by neighbourhood complexity. European Journal of Combinatorics, 75:152–168, 2019. doi:10.1016/J.EJC.2018.08.001.