On Geometric Bipartite Graphs with Asymptotically Smallest Zarankiewicz Numbers

Abstract
This paper considers the Zarankiewicz problem in bipartite graphs with low-dimensional geometric representation (i.e., low Ferrers dimension). 111Ferrers dimension, along with interval dimension and order dimension, is a standard dimensional concept in graphs. Please refer to the introduction for formal definition. Let be the maximum number of edges in a bipartite graph with nodes and is free of a -by- biclique. Note that for all “natural” graph classes. Our first result reveals a separation between bipartite graphs of Ferrers dimension three and four: while we show that for graphs of Ferrers dimension three, for Ferrers dimension four graphs (Chan & Har-Peled, 2023) (Chazelle, 1990). To complement this, we derive a tight upper bound of for chordal bipartite graphs and for grid intersection graphs (GIG), a prominent graph class residing in four Ferrers dimensions and capturing planar bipartite graphs as well as bipartite intersection graphs of rectangles. Previously, the best-known bound for GIG was , implied by the results of Fox & Pach (2006) and Mustafa & Pach (2016). Our results advance and offer new insights into the interplay between Ferrers dimensions and extremal combinatorics.
Keywords and phrases:
Bipartite graph classes, extremal graph theory, geometric intersection graphs, Zarankiewicz problem, bicliquesCopyright and License:
2012 ACM Subject Classification:
Theory of computation Design and analysis of algorithmsFunding:
This work was supported by the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement No 759557).Editors:
Vida Dujmović and Fabrizio MontecchianiSeries and Publisher:
1 Introduction
Bipartite graphs are the most natural mathematical objects used to capture interrelations between two groups of interest. Therefore, it is unsurprising that they arise routinely in mathematical and algorithmic research communities. In extremal graph theory, bipartite graphs have been studied extensively from several perspectives.
The Zarankiewicz problem is perhaps among the oldest questions in extremal graph theory. In 1951, Zarankiewicz asked for the maximum number of edges in a bipartite graph with nodes on each side that does not contain a complete bipartite subgraph . 222Here, we are interested in a symmetric form of the Zarankiewicz problem. A more general question can involve graphs with different numbers of vertices on each side, that do not contain some biclique . Equivalently, given an -by- matrix with 0/1 entries, that does not contain a -by- all-one submatrix, what is the maximum number of -entries in such a matrix? This question was partially answered by Kövari, Sós and Turán: If we denote such number by , it was proven that [20], and the best known lower bound is shown in [2]. Exact values are known for , , and closing the gap for is one of the central open questions in extremal combinatorics. A trivial lower bound would be , achieved by .
This question has also attracted significant interest in the context of specific graph classes, particularly those with additional structural constraints [4, 25, 12]. Chan and Har-Peled, for instance, studied a wide range of geometrically defined bipartite graphs [4], such as incidence graphs of points and rectangles, disks, or pseudodisks.
1.1 Our contributions
We consider the Zarankiewicz problem for geometric bipartite graphs. For “natural” graph classes, the lower bound of holds trivially. Our results show that a nearly tight upper bound can be achieved for many natural graph classes.
To formalize the discussion, consider a bipartite intersection graph , defined by two families of objects and , where each vertex (resp. ) is associated with an object (resp. ); Let for and be the bijection between vertices and their representations. We say that is an intersection representation of . Whenever the mapping is clear from the context, we omit it. Table 1 shows bipartite intersection graphs relevant to this paper.
| Graph Classes | Family | Family | domain | Example |
|---|---|---|---|---|
| rightward rays | points | |||
| intervals | points | |||
| rightward rays | upward rays | |||
| horizontal segments | upward rays | |||
| horizontal segments | vertical segments | |||
| axis-aligned rectangles | points |
For two graph classes and , we use to denote the class of graphs, such that every graph is the intersection of some graphs , , where intersection between graphs is defined as the intersection between their nodes and edges. When , we use the notation , and similarly for other powers.
The concept of Ferrers dimension is crucially based on chain graphs (). A bipartite graph is in if it is an intersection graph of rays and points on the line [7]. Ferrers dimension of a bipartite graph , denoted by , is the smallest integer , such that . It is known that every -vertex graph has Ferrers dimension at most .
We will use to denote the maximum number of edges in a bipartite graph , where , , such that the graph does not contain as a subgraph, and simply , when .
Our first main result provides a dichotomy between Ferrers dimension three and four.
Theorem 1 (Dichotomy theorem).
The following dichotomy results hold for all :
-
.
-
.
By using our upper bound for Ferrers dimension three as a base case, a result by Chan and Har-Peled [4] can be improved (proof in Appendix A).
Corollary 2.
For graphs of Ferrers dimension , , we have .
We complement the lower bound for by providing Zarankiewicz upper bounds for a prominent graph class in .
Theorem 3.
For all , .
This is our second main result. Grid intersection graph (GIG) is an intersection graph of horizontal and vertical segments in . This graph class contains all graphs of Ferrers dimension two and is known to be in . GIG is rich, includes all planar bipartite graphs, and is equivalent to the bipartite intersection graphs of rectangles [1]. They have been studied from both structural and algorithmic perspectives [8, 22, 21]. This result improves upon the upper bound that follows from [25, 13] (their results hold for more general intersection graphs of curves).333Note that Fox and Pach explicitly mentioned the term , while Mustafa and Pach’s dependency on is somewhat hidden in their calculation. Looking at their calculations reveals that the constant is .
Our final result applies to chordal bipartite graphs – a bipartite graph is chordal if every cycle of length at least six contains a chord. Chordal bipartite graphs contain all graphs of Ferrers dimension at most two. On the other hand, it is relatively rich, having unbounded Ferrers dimension [7, 6].
Theorem 4.
For all , , where is a class of chordal bipartite graphs.
We observe that even for (see Lemma 38 in Appendix E), so our upper bound is tight up to an additive constant for fixed . Theorem 4 improves upon the upper bound that holds for [4] (since such graphs have Ferrers dimension at most two). Please refer to Table 2 for a comprehensive list of our results and Figure 1 for a landscape of , when is one of these graph chasses.
| Graph classes | Our UB | Known UB |
|---|---|---|
| Chordal bipartite graphs | for a special case. [4] | |
| Segment ray graphs (SR) | [4] | |
| Grid intersection graphs (GIG) | [13, 25] |
We remark that all our upper bounds are algorithmic in the sense that, given a graph and its geometric representation in class , we give an efficient algorithm that reports a -by- biclique whenever the number of edges exceeds our upper bound (e.g., given a grid intersection graph with more than edges, our algorithm efficiently finds a -by- biclique).
Comparison to known results.
Prior to our results, the upper bound has been known for , segments and rays444Chan and Har-Peled use the equivalent 3-sided rectangle and point intersection graphs., and halfspaces and points [4]. We improve a constant for (since it is a special case of chordal bipartite graphs) and generalize their result on the segment-ray graphs to grid intersection graphs. The grid intersection graph is a special case of string graphs, so the upper bound [13, 25] of follows from their results on string graphs. Please refer to Figure 1 for the relations between these classes.
Further related works.
The graph classes in this paper have received much attention from various perspectives, including recognition algorithms, optimization, and structures. For instance, chordal bipartite graphs have been considered in [23, 15, 24, 30]. For grid intersection graphs, the recognition problem is NP-complete [21, 22]. The class is known to capture planar bipartite graphs [16] and is equivalent to the intersection graph of rectangles that are bipartite [1]. For more detailed literature on GIG, we refer the readers to an exposition in the PhD thesis of Mustata [26].
Zarankiewicz problems have been studied in many other special graphs, such as semi-algebraic graphs [14, 10], graphs of bounded VC dimension [17], graphs forbidding a fixed induced subgraph [3], and in geometric intersection graphs [18, 5, 4, 29, 5]. We refer to the recent survey by Smorodinsky for a more comprehensive list of related works [28].
2 Preliminaries
We use standard graph-theoretic notation. A bipartite graph is denoted as where and are partitions of the vertices. For a graph , we refer to its set of vertices as , its set of edges as , and its induced subgraph on as .
The intersection of two graphs and is defined as . When belongs in graph class and in class , then we say that belongs in . For graph classes and , that are closed under taking induced subgraphs, a graph can be assumed to be the intersection of two graphs on the same vertex set, because if , then . Similarly for .
Therefore, for two graph classes and that are closed under taking induced subgraphs, the intersection of the graph classes can be defined as:
One can naturally write ( times).
Bicliques are the graphs , where and are some positive integers.
Proposition 5.
If the graph class contains every biclique, then .
Proof.
Here, we show that for any positive integer , . Let . Then take being the complete bipartite graph on and (where the edges connect vertices in and ). Then . Therefore, .
Since contains every biclique, this implies that . It is known that is equivalent to the class of all two-directional orthogonal ray graphs (2DOR) [7, Theorem 2.1].
A bipartite graph is convex over if there exists an ordering such that for all , the vertices are contiguous ( for some ). We call the set of such graphs . is known to be equivalent to a containment graph of points and intervals in . An interesting graph class worth mentioning is – the intersection of two convex graphs.
Theorem 6.
A bipartite graph is in if and only if is a disjoint union of and graphs.
The proof can be found in Appendix B.
3 Warm-up
Recall that a graph is -degenerate if every induced subgraph has a vertex of degree at most . All graph classes considered in this paper are closed under taking induced subgraphs.
Observation 7.
A -degenerate graph has at most edges.
3.1 Chordal bipartite graphs
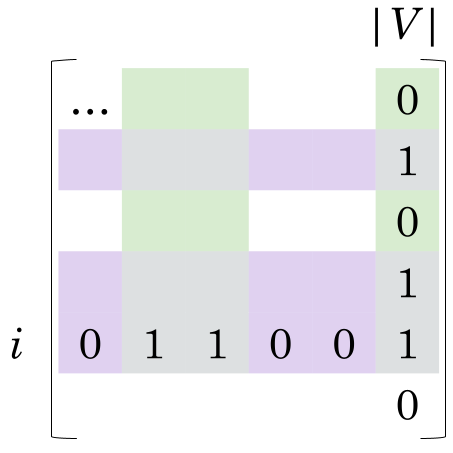
For a bipartite graph , denote its biadjacency matrix by . We say that a matrix contains submatrix if we can obtain by removing some rows and columns of . A matrix is -free if it does not contain submatrix . A bipartite graph is -freeable, if there exists an ordering of rows and columns, such that the biadjacency matrix is -free.
The following structural result is known for chordal bipartite graphs.
Lemma 9.
For any , a chordal bipartite graph that does not contain is -degenerate.
Proof.
Let be a chordal bipartite graph. If for every induced subgraph of , a node of degree at most exists, we are done. Therefore, let us assume by contradiction that is an induced subgraph of , where a node of degree at most does not exist. Then all nodes have a degree of at least in . Using Theorem 8, we know that there is a -free biadjacency matrix of , where . Let be that biadjacency matrix. Let , where each row and column correspond to the vertices and , respectively. Let be the maximum integer, such that (i.e., this is the bottommost row in the last column such that the entry is one). Consider the rows and columns .
Let be the submatrix induced on rows and columns . According to our assumption, this submatrix contains at least rows and columns. It is easy to see that is an all-one matrix: Assume that it is not, and for some and . Since , we have and since , . The -by- submatrix induced on rows and columns is then equal to the forbidden pattern , a contradiction.
Theorem 10.
For all , , where is the class of chordal bipartite graphs.
Proof.
The result follows from Lemma 9 and Observation 7.
The matching lower bound is shown in Lemma 38.
Theorem 4.
[Restated, see original statement.]
For all , , where is a class of chordal bipartite graphs.
Proof.
The result follows from Theorem 10 when .
3.2 Segment ray graphs
Next, we present a simple proof of the upper bound of for the intersection graph of horizontal segments and vertical upward rays in , denoted by . More precisely, , is a segment ray () representation of a bipartite graph , if and are sets of horizontal segments and vertical upwards rays in respectively, and , such that , where , , if and only if and intersect.
Although the upper bound was shown in [4], we improve this upper bound to .
Lemma 11.
Every segment-ray graph that does not contain is -degenerate.
Proof.
Let be a segment-ray graph. If, for every induced subgraph of , a node of degree at most exists, we are done. Therefore, let us assume by contradiction, that is an induced subgraph of , where a node of degree at most does not exist. Then, all nodes must have a degree at least in .
Let be the representation of , such that . Let and be the horizontal and vertical axes, respectively. Each ray can be addressed by a pair , where and are the and coordinates of its starting point respectively. Each horizontal segment can be addressed using three variables , such that and are the projections of to the and axis respectively.
Let be the ray with the largest (highest starting point). Let be the set of segments that intersect . Then, according to our assumption, . Let be the set of segments with the largest (rightmost) , and let be the set of segments with the least (leftmost) . Then there must be at least one segment (Figure 3).

Let be the set of rays that intersect . By our assumption, . Let be the sets of rays to the left and right of , respectively. Since , then at least one of must contain at least rays. Let us assume it is , the other case can be argued symmetrically. Since is the ray with the highest , then each ray in must intersect each segment in (Figure 3). This implies that the vertices mapped to rays in and segments in must induce a -by- biclique. This is a contradiction.
Theorem 12.
For all , in segment ray graphs.
Proof.
The result follows from Lemma 11 and Observation 7.
Corollary 13.
When , in segment ray graphs.
4 Graphs of Ferrers Dimension Three
This section presents the proof of the first part of Theorem 1.
Let and be the horizontal and vertical axes, respectively. We say that a rectangle in is bottomless 555These rectangles have also been called -sided rectangles [4] in the context of graphs. if its projection to the -axis is an interval that starts at .
We say that is a segment bottomless rectangle containment representation of a bipartite graph , if and are sets of horizontal segments and bottomless rectangles in , respectively, , and for all , , we have if and only if is contained within . A bipartite graph is a segment bottomless rectangle containment graph, if it has a segment bottomless rectangle containment representation.
For , let and denote the projections of to - and -axis respectively. For an interval , we use and to denote its minimum and maximum points.
Lemma 14.
A bipartite graph is of Ferrers dimension three () if and only if it is a segment bottomless rectangle containment graph.
The proof can be found in Appendix C.
Given a bipartite graph , we now know it must have a containment representation , where and are sets of horizontal segments and bottomless rectangles in , and .
Let be the minimum positive integer such that does not contain as a subgraph.
Without loss of generality, assume that no two horizontal segments have the same -coordinate. We define three (strict) partial orders (denoted by , , and ) on that will be crucial to our analysis (Figure 4). For , we say
-
succeeds in the partial order , and denote it by , if , , and ,
-
succeeds in the partial order , and denote it by , if , and , and ,
-
succeeds in the partial order , and denote it by , if .
It is easy to check that , , and are transitive and asymmetric.

If or , we say that and are comparable in ; otherwise, they are incomparable. We can say the same about comparability in and . The following claim is straightforward, and a consequence of a simple case analysis (see Figure 4).
Observation 15.
A pair of segments is comparable in one of the partial orders .
For a segment , denote by the sets of all successors of with respect to partial orders , and , respectively.
To count the number of edges in a bipartite graph with a representation , we classify the edges into bulky and thin edges. For an edge , we have containment , where , . We say that the edge is DL-bulky if the bottomless rectangle contains segments from (See Figure 5). We can analogously define DR-bulky and C-bulky edges. All edges that are not bulky are called thin. An edge is bulky if it is DL-bulky, DR-bulky, or C-bulky.

If or , we say that and are comparable in ; otherwise, they are incomparable. We can say the same about comparability in and . The following claim is straightforward, and a consequence of a simple case analysis (see Figure 4).
Lemma 16.
For each , the number of bulky edges incident to of each type is at most . Therefore, at most bulky edges are incident to each .
Proof.
We present the proof for DL-bulky edges. The proofs for the other two cases are similar. Let be the nodes , such that is DL-bulky. Let be the segments with the largest . Let be the set of nodes represented by .
We will show that each has in its neighborhood, and therefore . Assume by contraposition that . Let be an arbitrary node. For any , and imply the following:
-
. Since , we have , and since contains , we have . Since is an interval that starts at , then .
-
. Similarly to the previous case, the implications give us the inequalities in
Let be an arbitrary segment. Since contains on the -axis, is larger than any point in on the -axis, then to show that contains , it only remains to show that . Since was chosen to contain the segments in with the largest , then holds for , if it holds for any segments in . Since is DL-bulky, contains at least segments in . This implies that contains , and we have . Since this is true for all , then and induce a , which is a contradiction.
The proof for DR-bulky edges is symmetric and the proof for C-bulky edges can easily be seen by selecting to be the segments with the smallest . Since every is already contained in on the -axis, then the coordinate is the only factor determining which elements of are contained within a bottomless rectangle that contains .
Lemma 17.
For each , there are at most thin edges incident to .
Proof.
For a partial order , we use to denote the number of comparable pairs in .
Let be the set of nodes , such that is thin. Let be the partial orders induced on set . According to Observation 15, each pair of segments , is comparable in at least one of the partial orders. We then have .
Since for all , the edge is thin, there are at most DL-successors of in , so we have . Similarly, we have at most C-successors and DR-successors in . Therefore, . Combining the edges in the three partial orders, we get . Putting these inequalities together, we have
which implies that
Theorem 18.
For all , .
Proof.
Let be a -free graph, where , . Note that we defined every edge in as either thin or bulky. According to Lemma 16, the number of bulky edges in is at most . According to Lemma 17, the number of thin edges in is at most . This means that the total number of edges is .
Corollary 19.
When , we have .
Theorem 1 (Dichotomy theorem).
[Restated, see original statement.]
The following dichotomy results hold for all :
-
.
-
.
Proof.
The first part will be proved in Section 4. The second part is a simple corollary of existing results: Chazelle [9] constructed -free graphs on vertices that have at least edges. Chan and Har-Peled [4] assert the applicability of this result in graph theory, since the original context was pointer machines. By a simple modification that we show in Lemma 36, there exist -free graphs on vertices with at least edges. Since (Lemma 31), which is contained in [7], then the constructed graphs give a lower bound for Zarankiewicz numbers for graphs.
5 Grid Intersection Graphs
This section will use a more formal definition of grid intersection graphs. We say that is a grid intersection representation of a bipartite graph , if , are sets of horizontal and vertical segments in respectively, , and for all , , we have if and only if and intersect. A bipartite graph is a grid intersection graph () if it has a grid intersection representation. For a segment , let , e.g the set of segments that intersect .
Let be the minimum positive integer such that does not have as a subgraph.
Observation 20.
If is -degenerate, then .
The proof is done via charging arguments.
5.1 Charging Arguments
For each segment , let and denote its projections to the -axis (horizontal) and -axis (vertical) respectively. Note that the projections are closed intervals and points. For an interval , let and . For two intervals and , we say that , if .
For any segment , we define , i.e. the set of segments whose projection to the axis is entirely smaller than that of . Similarly, we define , , . For a set , we define and similarly for the other directions.
Definition 21.
We say that a vertical segment is down-heavy with respect to , if and .
Definition 22.
We say that a vertical segment is up-heavy with respect to , if and .

To show that a node , such that exists in any graph, we present a payment scheme algorithm whereby each horizontal segment starts with credits, which is subsequently paid to vertical segments. We will see that each vertical segment whose degree is at least , receives at least credits.

Now, we will analyze the credits received by an arbitrary vertical segment .
For a set of horizontal segments , let denote the interval , where and .
Lemma 23.
Let , such that
-
-
(Intuition: is not among the highest elements of )
-
(Intuition: is not among the lowest elements of )
Then at least credits are paid to from horizontal segments , such that .
The proof is deferred to Appendix D.
Lemma 24.
If , then receives at least credits.
Proof.
We choose the maximum number of disjoint sets in , such that every set satisfies the conditions of Lemma 23. Since each set receives credits from a distinct set of horizontal segments, then the total amount in credits receives is at least .
It remains to see that . Note that . We get that . Since according to our assumption , then this result is at least .
Lemma 25.
Any is -degenerate.
Proof.
Assume by contradiction that there is a graph , where no such node exists. Since according to our assumption, for any node , we have , then by running Algorithm 1 and Algorithm 2, we see that for each horizontal node, fewer credits are given out than their degree. This implies that the amount in credits given by these algorithms is smaller than .
For each vertical node , on the other hand, according to Lemma 24, the amount in credits received is at least that of their degree. This implies that the total amount in credits received from these algorithms greater than or equal to . This is a contradiction.
Theorem 26.
For all , .
Proof.
The result follows from Lemma 25 and Observation 7.
Theorem 3.
[Restated, see original statement.]
For all , .
Proof.
The result follows from Theorem 26, when
References
- [1] Stephen J. Bellantoni, Irith Ben-Arroyo Hartman, Teresa M. Przytycka, and Sue Whitesides. Grid intersection graphs and boxicity. Discret. Math., 114(1-3):41–49, 1993. doi:10.1016/0012-365X(93)90354-V.
- [2] Tom Bohman and Peter Keevash. The early evolution of the H-free process. Inventiones Mathematicae, 181(2):291–336, May 2010. doi:10.1007/s00222-010-0247-x.
- [3] Romain Bourneuf, Matija Bucić, Linda Cook, and James Davies. On polynomial degree-boundedness. Advances in Combinatorics, 2024. doi:10.19086/aic.2024.5.
- [4] Timothy M. Chan and Sariel Har-Peled. On the number of incidences when avoiding an induced biclique in geometric settings. In Nikhil Bansal and Viswanath Nagarajan, editors, Proceedings of the 2023 ACM-SIAM Symposium on Discrete Algorithms, SODA 2023, Florence, Italy, January 22-25, 2023, pages 1398–1413. SIAM, 2023. doi:10.1137/1.9781611977554.CH50.
- [5] Timothy M. Chan, Chaya Keller, and Shakhar Smorodinsky. On Zarankiewicz’s problem for intersection hypergraphs of geometric objects. In Oswin Aichholzer and Haitao Wang, editors, 41st International Symposium on Computational Geometry, SoCG 2025, June 23-27, 2025, Kanazawa, Japan, volume 332 of LIPIcs, pages 33:1–33:14. Schloss Dagstuhl – Leibniz-Zentrum für Informatik, 2025. doi:10.4230/LIPICS.SOCG.2025.33.
- [6] L. Sunil Chandran, Mathew C. Francis, and Rogers Mathew. Chordal bipartite graphs with high boxicity. Graphs Comb., 27(3):353–362, 2011. doi:10.1007/S00373-011-1017-2.
- [7] Steven Chaplick, Pavol Hell, Yota Otachi, Toshiki Saitoh, and Ryuhei Uehara. Intersection dimension of bipartite graphs. In T. V. Gopal, Manindra Agrawal, Angsheng Li, and S. Barry Cooper, editors, Theory and Applications of Models of Computation - 11th Annual Conference, TAMC 2014, Chennai, India, April 11-13, 2014. Proceedings, volume 8402 of Lecture Notes in Computer Science, pages 323–340. Springer, 2014. doi:10.1007/978-3-319-06089-7_23.
- [8] Steven Chaplick, Pavol Hell, Yota Otachi, Toshiki Saitoh, and Ryuhei Uehara. Ferrers dimension of grid intersection graphs. Discret. Appl. Math., 216:130–135, 2017. doi:10.1016/J.DAM.2015.05.035.
- [9] Bernard Chazelle. Lower bounds for orthogonal range searching: I. the reporting case. J. ACM, 37(2):200–212, 1990. doi:10.1145/77600.77614.
- [10] Thao Do. Representation complexities of semialgebraic graphs. SIAM J. Discret. Math., 33(4):1864–1877, 2019. doi:10.1137/18M1221606.
- [11] Martin Farber. Characterizations of strongly chordal graphs. Discret. Math., 43(2-3):173–189, 1983. doi:10.1016/0012-365X(83)90154-1.
- [12] Jacob Fox and János Pach. Separator theorems and Turán-type results for planar intersection graphs. Advances in Mathematics, 219(3):1070–1080, 2008. doi:10.1016/j.aim.2008.06.002.
- [13] Jacob Fox and János Pach. A separator theorem for string graphs and its applications. Comb. Probab. Comput., 19(3):371–390, 2010. doi:10.1017/S0963548309990459.
- [14] Jacob Fox, János Pach, Adam Sheffer, Andrew Suk, and Joshua Zahl. A semi-algebraic version of Zarankiewicz’s problem. Journal of the European Mathematical Society (EMS Publishing), 19(6):1785–1810, 2017. doi:10.4171/JEMS/705.
- [15] Petr A. Golovach, Pinar Heggernes, Mamadou Moustapha Kanté, Dieter Kratsch, and Yngve Villanger. Enumerating minimal dominating sets in chordal bipartite graphs. Discret. Appl. Math., 199:30–36, 2016. doi:10.1016/J.DAM.2014.12.010.
- [16] Irith Ben-Arroyo Hartman, Ilan Newman, and Ran Ziv. On grid intersection graphs. Discret. Math., 87(1):41–52, 1991. doi:10.1016/0012-365X(91)90069-E.
- [17] Oliver Janzer and Cosmin Pohoata. On the Zarankiewicz problem for graphs with bounded VC-dimension. Comb., 44(4):839–848, 2024. doi:10.1007/S00493-024-00095-2.
- [18] Chaya Keller and Shakhar Smorodinsky. Zarankiewicz’s problem via -t-nets. In Wolfgang Mulzer and Jeff M. Phillips, editors, 40th International Symposium on Computational Geometry, SoCG 2024, June 11-14, 2024, Athens, Greece, volume 293 of LIPIcs, pages 66:1–66:15. Schloss Dagstuhl – Leibniz-Zentrum für Informatik, 2024. doi:10.4230/LIPICS.SOCG.2024.66.
- [19] Bettina Klinz, Rüdiger Rudolf, and Gerhard J. Woeginger. Permuting matrices to avoid forbidden submatrices. Discret. Appl. Math., 60(1-3):223–248, 1995. doi:10.1016/0166-218X(94)00054-H.
- [20] Tamás Kővári, Vera T. Sós, and Pál Turán. On a problem of K. Zarankiewicz. Colloquium Mathematicum, 3:50–57, 1954. URL: http://eudml.org/doc/210011.
- [21] Jan Kratochvíl. A special planar satisfiability problem and a consequence of its NP-completeness. Discret. Appl. Math., 52(3):233–252, 1994. doi:10.1016/0166-218X(94)90143-0.
- [22] Jan Kratochvíl and Jiří Matoušek. NP-hardness results for intersection graphs. Commentationes Mathematicae Universitatis Carolinae, 30(4):761–773, 1989. URL: http://eudml.org/doc/17790.
- [23] Anna Lubiw. Doubly lexical orderings of matrices. In Robert Sedgewick, editor, Proceedings of the 17th Annual ACM Symposium on Theory of Computing, May 6-8, 1985, Providence, Rhode Island, USA, pages 396–404. ACM, 1985. doi:10.1145/22145.22189.
- [24] Haiko Müller. Hamiltonian circuits in chordal bipartite graphs. Discret. Math., 156(1-3):291–298, 1996. doi:10.1016/0012-365X(95)00057-4.
- [25] Nabil H. Mustafa and János Pach. On the Zarankiewicz problem for intersection hypergraphs. In Emilio Di Giacomo and Anna Lubiw, editors, Graph Drawing and Network Visualization - 23rd International Symposium, GD 2015, Los Angeles, CA, USA, September 24-26, 2015, Revised Selected Papers, volume 9411 of Lecture Notes in Computer Science, pages 207–216. Springer, 2015. doi:10.1007/978-3-319-27261-0_18.
- [26] Irina Mustata. On subclasses of grid intersection graphs. PhD thesis, Technische Universität Berlin, 2014. doi:10.14279/depositonce-4202.
- [27] Pranab K. Saha, Asim Basu, Malay K. Sen, and Douglas B. West. Permutation bigraphs and interval containments. Discret. Appl. Math., 175:71–78, 2014. doi:10.1016/J.DAM.2014.05.020.
- [28] Shakhar Smorodinsky. A survey of Zarankiewicz problem in geometry. CoRR, abs/2410.03702, 2024. doi:10.48550/arXiv.2410.03702.
- [29] István Tomon and Dmitriy Zakharov. Turán-type results for intersection graphs of boxes. Combinatorics, Probability and Computing, 30(6):982–987, 2021. doi:10.1017/S0963548321000171.
- [30] Ryuhei Uehara, Seinosuke Toda, and Takayuki Nagoya. Graph isomorphism completeness for chordal bipartite graphs and strongly chordal graphs. Discret. Appl. Math., 145(3):479–482, 2005. doi:10.1016/J.DAM.2004.06.008.
Appendix A Higher Ferrers Dimension
We prove Corollary 2 in this section. Note that the proof closely follows Section 2.2 of Chan and Har-Peled [4]. We repeat their definitions here for completeness. For integers , we denote by . A dyadic range is an integer range of the form for some integers and . Considering a graph, we can view the points as integers . Denote by the set of all dyadic ranges. Each integer (point) appears in at most dyadic ranges.
Notice that a ray is simply a range for some .
Lemma 27 (An analogue of Lemma 2.2 in [4]).
Let be a ray. Denote by the set of minimal disjoint dyadic ranges covering . Then is unique and contains at most ranges.
Remark that we have instead of as in [4] since we have rays instead of intervals. The following lemma implies Corollary 2.
Lemma 28.
Let for that does not contain . Then the number of edges in is at most where .
Proof.
The proof is obtained by induction on . The base case when is proved in Theorem 18. When , assume the claim is true for all dimensions up to . We write where and . Since , it is an intersection bigraph of rays and points where is mapped to and to . Assume w.l.o.g. that for .
For each dyadic range , we have an auxiliary graph which is an induced subgraph where and . Notice that .
Moreover, where is a biclique; therefore and is free of -by- biclique. This allows us to invoke the induction hypothesis, which implies that
Finally, since each vertex appears in at most sets (and similarly for each vertex ), this implies that the above sum is at most .
Appendix B Intersection of Two Convex Graphs
In this section, we will use a more formal definition of graphs. We say that is a point-rectangle intersection representation of a graph , if , are sets of points and rectangles, respectively, in , , and for all , , we have if and only if and intersect. A graph is a point-rectangle intersection bigraph, if it has a point-rectangle intersection representation. We call the class of such graphs .

Lemma 29.
Any graph is a disjoint union of and graphs.
Proof.
Since , then there exist graphs and , such that . Let and be the partitions that the graphs and , respectively, are convex over, and , , the other partitions.
Since graphs are closed under taking induced subgraphs, we can assume that . Let , , , , as shown on Figure 9.
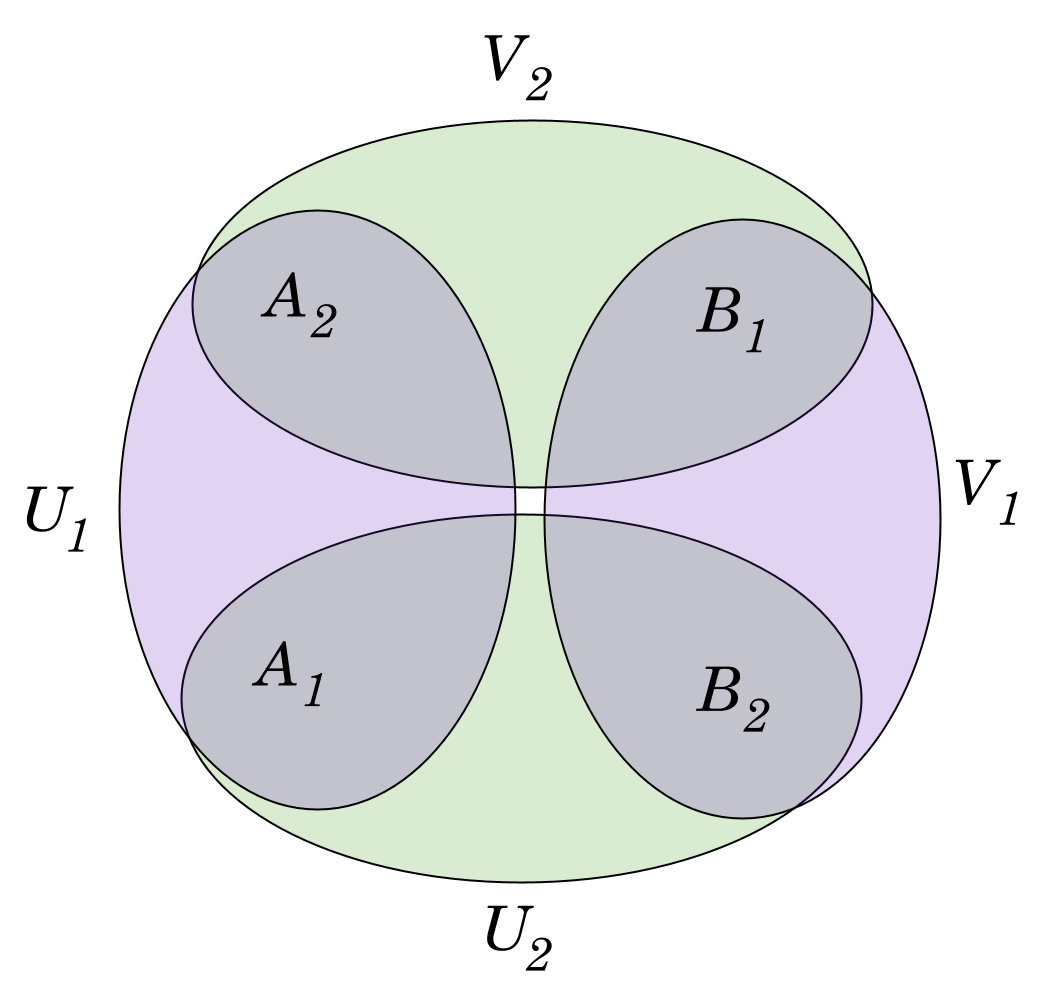
We have and all edges must start and end at these nodes. Since is in the same partition as , and , in at least one of the graphs, there can be no edges between and . The same is true for . Clearly, can have one component consisting of nodes and another component consisting of nodes , with no edges between these components.
It remains to see that and . To do this, we show that there exist representations of these graphs in and respectively, such that the projections of these representations to and axis are the convex representations of graphs and induced on and respectively.
Let and . Since and are convex over and , and , then and are convex over . Let be the point-segment representation of , such that are the points. Then . Let be the point-segment representation of , such that are the points. Then . We construct a mapping , where is a set of rectangles, and a set of points in . For each , is the object whose projection to the -axis is and whose projection to the -axis is . Note that for all , is a rectangle, and for all , is a point. It is easy to verify that intersects , if and only if intersects and intersects , which implies that there is an edge in the graph represented by , if and only if . This means that is a valid representation of .
Showing that is similar, but not quite symmetric. Let and . Since and are convex over and , and , , then and are convex over and respectively. Let us define to be the point-segment representation of , such that are the points. Then . Let be the point-segment representation of , such that are the points. Then . We construct a mapping , where is a set of horizontal segments, and is a set of vertical segments in . For each , is the object whose projection to the -axis is and whose projection to the -axis is . Note that for all , is a horizontal segment and for all , is a vertical segment. It is easy to verify that intersects , if and only if intersects and intersects , which implies that there is an edge in the graph represented by , if and only if . This means that is a valid representation of .
For graphs , , let to denote the disjoint union of and .
Lemma 30.
is closed under disjoint union.
Proof.
Let , be any disjoint graphs in . Then we have graphs , such that , and graphs , such that . Since is closed under disjoint union, then and . Then . Since only shares vertices with , and similarly, only shares vertices with , then .
Lemma 31.
.
Proof.
Let be any graph in , and the representation of in , such that is a set of points and a set of rectangles in . Then we can construct mappings and , such that for all , and are the projections of to and axis respectively. Let and be the graphs represented by and respectively. Since maps the vertices to points and segments based on their partitions, then . Similarly for . Since for any , , we have that intersects if and only if intersects and intersects , then . This proves that .
Lemma 32.
.
Proof.
The proof is symmetric to Lemma 31.
Theorem 6: Any graph if and only if it is a disjoint union of and graphs.
Appendix C Segment Bottomless Rectangle Containment Bigraph
We say that is an interval containment representation of a graph , if , in are intervals, , and for all , , we have if and only if is contained within . A graph is an interval containment bigraph, if it has an interval containment representation. According to [7], the class of interval containment bigraphs is .
Proposition 33.
If a graph has a point ray representation , , then it also has a point ray representation , , where are points and are rays.
Proof.
We are given with a point ray representation , , where represents points and represents rays extending to in .
For , let denote the minimum point in ray . Then for all , , we say that , if and only if .
We construct such that for each , , . Then for all , , and intersect if , which happens if and only if . This implies that is a representation of , where the partition is mapped to rays and to points. By flipping the representation, it is easy to see that there is an equivalent representation where rays extend to .
Lemma 14. A graph is of Ferrers dimension three () if and only if it is a bottomless rectangle segment containment graph.
Proof.
Let be a segment bottomless rectangle representation of graph , such that . We will see that .
First, we consider the graph represented by the projections of to the axis. Since is an interval containment bigraph, then ([27], [7]). Secondly, consider the graph represented by the projections of to the axis. Since is an intersection graph of points and rays, then . Since each contains if and only if and , then .
Next, we will show that any graph has a segment bottomless rectangle representation. According to [7], there exist graphs and , such that . Let be an interval containment representation of , such that represent the contained segments and the containing ones. Let us consider the case that , the case that is symmetric. Let be a point ray representation of , such that are points and are rays, (Proposition 33).
We construct a segment bottomless rectangle representation , , such that for all , , . Let be the graph represented by . For all , , is contained within if and only if is contained within and is contained within . This implies that , which means that is a representation of .
Appendix D Grid Intersection Graphs
We say is generous to (or simply generous), if Algorithm 1 pays any credits to from . We consider the remaining segments in stingy to .
First, we will see that if for a section of a vertical node, not enough credits are gained from Algorithm 1, then there are horizontal segments in that section, which will contribute to Algorithm 2 instead.
Lemma 34.
Let , and be the stingy subset, such that
-
-
-
( contains consecutive neighbors of )
Then there exists a set , such that
Proof.
The number of stingy nodes is at least . Let the stingy subset of be . For any , there are at least segments in either or .
Let be the segment with the smallest . Let and . We consider the case that . The case that is symmetric. Let be the rightmost down-heavy vertical segments in Algorithm 1, that are each paid credits from . Let be the vertical segment with the largest .
Since has the largest and has the smallest , then and induce a biclique (Figure 10). Since and there cannot exist a , then , which implies that is greater than ( does not extend far enough down to include stingy nodes below ).

Since is down-heavy w.r.t , then (Definition 21). Let . Note that , because is greater than and . Due to how was chosen (the last condition), this implies that the nodes in that intersect are in .
Since nodes of cannot be in , then . Since , then .
Let us consider the conditions for . Since , , and none of intersect , then . We already saw that and . Since is the segment with the smallest , then all intervals in projected to the axis must include . We have , which fulfills the last condition.
Lemma 35.
Let , and be the stingy subset, such that
-
-
-
( contains consecutive neighbors of )
Then there exists a set , such that
Proof.
The proof is symmetric to Lemma 34.
Lemma 23. Let , such that
-
-
( is not among the highest elements of )
-
( is not among the lowest elements of )
-
( contains consecutive neighbors of )
At least credits are paid to from horizontal segments , such that .
Proof.
If contains at least generous nodes, which each contribute at least credits (Algorithm 1), the lemma holds. Otherwise, let be the set of stingy nodes in . We have that .
Let be the set of nodes such that and for each , intersects . According to Lemma 34, . Let be the segments with the smallest .
We will see that Algorithm 2 pays credits to from every segment . Let be an arbitrary segment. Let and . Since , then either or . We consider the case that . The case that is symmetric. Let be the rightmost down-heavy vertical segments in Algorithm 2, that are each paid credits from . Note that if , then we have shown that Algorithm 2 pays credits to from . Since, according to our choice of , it is not among the lowest neighbors of , then is down-heavy concerning . This implies that , unless all nodes of are to the right of . Since we have reached our goal in the case of , let us now consider only the case that (Figure 11). Let be the vertical segment with the largest .

Since and some point in must intersect on the axis, then all segments in (which are between them) also intersect all segments in when projected to the -axis. Since has the largest , then and induce a biclique (Figure 11). Since and there cannot exist a , then , which implies that is greater than ( does not extend far enough down to include stingy nodes below ).
Since is down-heavy w.r.t , then (Definition 21). Let . Note that , because is greater than and . Due to how was chosen (the last condition), this implies that the nodes in that intersect are in . Since nodes of cannot be in , then . Since , then .
Since all nodes that intersect in , must be in , then . Since, according to our assumption, , then no horizontal segment in can be to the left of without intersecting . Let . Then we have .
As discussed, when projected to the -axis, all segments in intersect all segments in . We have and . Therefore, on the -axis, we have a point that intersects as well as . According to how we defined , we have .
Since for all , , then contains , if it contains . This implies that , which is a contradiction, since we chose such that it would only contain segments. This implies that the case that is impossible.
Let be the set of nodes such that and for each , intersects . According to Lemma 35, . Let be the segments with the largest . The proof that Algorithm 2 pays credits to from every segment is symmetric.
Appendix E Lower bounds
Lemma 36.
If there exists a -free graph on nodes and edges, then there exists a -free graph on nodes and edges.
Proof.
Let be any -free graph in , and the representation of in , such that , is a set of points and a set of rectangles in .
We construct a new graph , that is represented in by , as follows. For every , we create copies in , and for every , we create copies in . It is easy to see that , . Let us see the number of edges. For every , intersects with rectangles in . In , a copy of intersects with all the copies of , which number in . Let be a node in that is represented by a copy of . The degree of is times larger than the degree of . Since the number of nodes in is also times larger than in , then .
Finally, let us see that is -free. Suppose by contradiction that has as a subgraph. Let and be the nodes that induce in . Then there must be at least two nodes , whose copies form , and at least two nodes whose copies form . Since is a biclique, then it has edges between all pairs of nodes. There can be an edge between a pair of nodes , , , if and only if that edge existed in between the nodes whose copies and are. This implies that and must have induced a in . This is a contradiction.
Similarly, we can construct copies of other geometric intersection graphs.
Corollary 37.
If there exists a -free graph on nodes and edges, then there exists a -free graph on nodes and edges.
Lemma 38.
.
Proof.
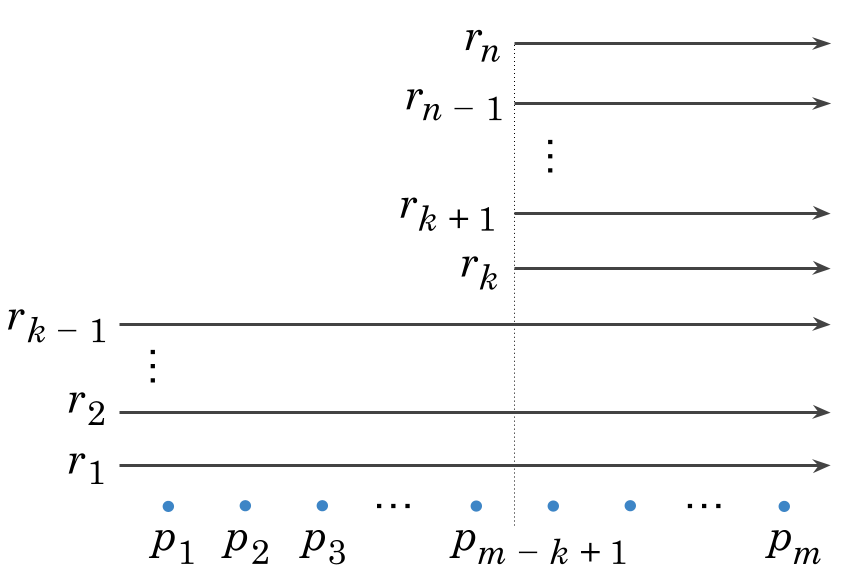
Consider a chain graph where corresponds to the rightward rays and to the points . Let all the points be placed on the real line such that each point is at coordinate . The rays start at the coordinate , which contains all the points. The remaining rays start at coordinate , so they contain points (see Figure 12). Clearly, the graph does not contain a biclique . The number of edges is .
E.1 Unit Grid Intersection Graphs
Although we do not know the correct bound for the grid intersection graphs, this section presents a lower bound construction that suggests that the leading constant of is likely at least . This contrasts grid intersection graphs with chordal bigraphs (where the tight bound has a leading constant ).
Our lower bound holds for the special case where all segments have unit length; such an intersection bigraph is called a Unit Grid Intersection Graph ().
Theorem 39.
We have for unit grid intersection graphs.
First, we construct the graph for , and then we apply Corollary 37 to get a graph for . Note that since the method used in the Lemma is duplication, then the new graph created in the proof will also produce a . For any we can construct a graph as follows (Figure 13).
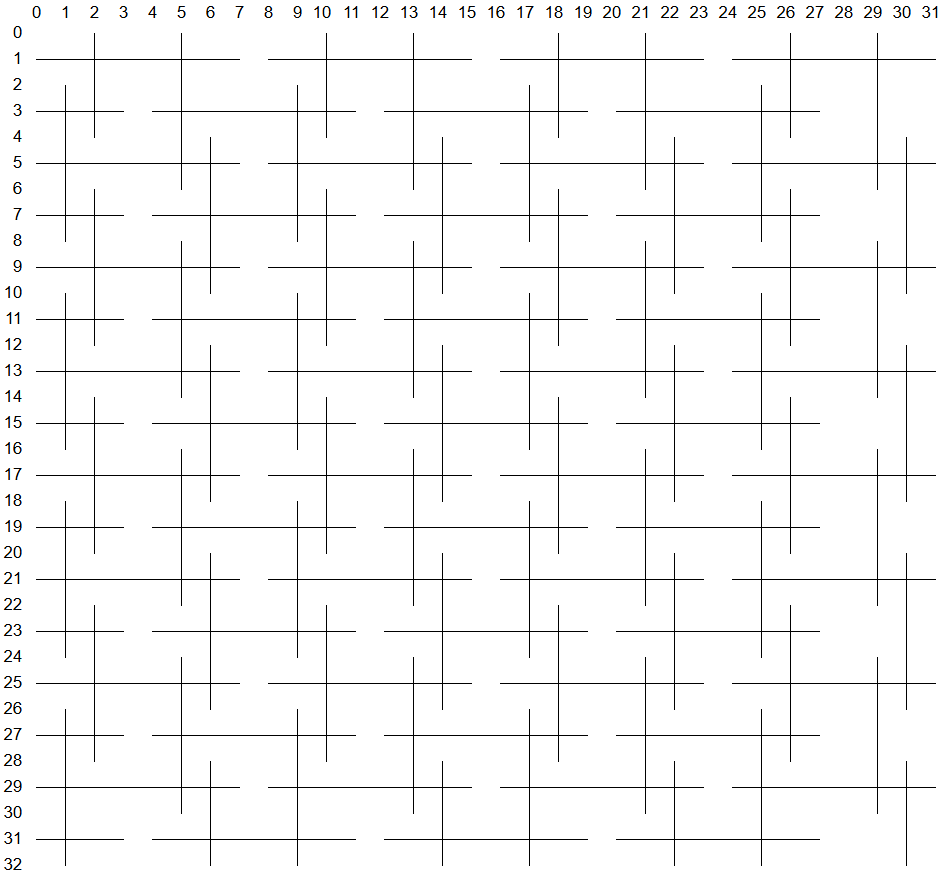
Note that and . To count the number of edges, we count the edges incident to horizontal segments . Consider the segments that are added by the first line in the algorithm. For these segments, the degree for (y-coordinate ) is , and for all others, the degree is (Figure 13). The number of edges incident to the first type of horizontal segments is . Now, consider the segments added by the second line in the algorithm. For these segments, all cases where have one degree less than , as well as the cases where (the case where both are true has degree , see Figure 13). In total, the number of edges incident to these segments is therefore . The constructed graph has and the number of edges is .

Let faces be the areas bordered by segments. To see that the graph is -free, note that a representation of a would form a rectangle. Since segments in each partition have identical lengths, a rectangle that contains only non-rectangle faces cannot exist. Since none of the faces in the graph are rectangles (Figure 15), the graph is -free. This finishes the proof for .
Next, we use Corollary 37, to create a -free graph , where and . Using the value , we get .