Radical Innovation and Design for Connected and Automated Vehicles
Abstract
This report documents the program and the outcomes of Dagstuhl Seminar 22222 “Radical Innovation and Design for Connected and Automated Vehicles”.
Automated driving will most likely be the next big change in individual mobility. While research is still primarily concerned with technical challenges of Automated Driving Systems (ADS), HCI researchers and designers already started to develop concepts on how to use privately owned ADS as a space for non-driving-related activities, going beyond what is possible today. There is, however, room to think about creative ways to use automated vehicles (AV) and connected technology towards the public interest beyond incremental changes, which is what we addressed in this seminar. We challenged the current generative/evaluative research approach for automated driving systems against a radical innovations attempt and questioned whether the current incremental research approach is appropriate for the development of future vehicles. As an integral part of the seminar we wanted participants to learn from each other and to disseminate each individual’s experience for boosting subsequent research by trying out different methods that support the “out of the box” thinking (e.g., brainwriting, bodystorming, focus groups, World Café, amongst others).
Keywords and phrases:
Racidal Innovation, Automated Driving, Future Mobility, SustainabilitySeminar:
May 29–June 3, 2022 – http://www.dagstuhl.de/222222012 ACM Subject Classification:
Human-centered computing Accessibility ; Human-centered computing HCI design and evaluation methodsCopyright and License:
1 Executive Summary
Andreas Riener (TH Ingolstadt, DE)
Wendy Ju (Cornell Tech – New York, US)
Bastian Pfleging (TU Bergakademie Freiberg, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener, Wendy Ju, and Bastian Pfleging
Creative Commons BY 4.0 International license © Andreas Riener, Wendy Ju, and Bastian Pfleging
Automated driving will most likely be the next big change in individual mobility. Currently, research is still primarily concerned with technical challenges of Automated Driving Systems (ADS), such as sensing, data processing, communication, or steering. HCI researchers have already started to develop concepts for working, relaxing, or recreational activities (in privately owned) ADS as rather incremental innovations. There is, however, room to think about creative ways to use automated vehicles (AV) and connected technology towards the public interest beyond incremental changes. Current open questions are, amongst others:
-
What are possible innovative and groundbreaking visions for future human transport concepts?
-
How can we apply radical innovation and design and leverage AV technology to other applications and use cases?
-
What types of research and design methods are able to contribute to radical designs, instead of incremental?
This Dagstuhl Seminar aimed to contribute to continued research that is able to challenge the current generative/evaluative research approach for automated driving systems against a radical innovations attempt. Similar to the invention of the car, which was not just an incremental improvement of a horse carriage, we want to question whether the current incremental research approach is appropriate and want to provoke novel opportunities. We further wanted to challenge whether a human-centered design approach is appropriate in the domain of connected, automated vehicles or if related innovation-centered approaches like design thinking are more constructive.
An integral part of the seminar was to reach the next level of product quality, to learn from each other, and to disseminate individual’s experience for boosting subsequent research. In order to give the seminar participants something they can use directly from the seminar, we dedicated two blocks of time for teaching methodological knowledge in addition to the creative sessions, interactive panels and practical work. The goal was to give the participants the opportunity to try out new methods, such as brainwriting, bodystorming, focus groups, user enactment, WorldCafe, amongst others, that they would like to use in their own research in the future – thus a directly applicable result of the seminar. Details on the schedule of the seminar are shown below.
To promote trans- and interdisciplinarity, we invited computer scientists/engineers, interaction designers, UI/UX designers, market and consumer psychologists as well as urban planners from industry and academia to discuss and design future mobility and vehicle concepts. We expected three types of results from this seminar – and will discuss at the end of this report which contributions were created in the seminar and to which degree these results were achieved by the end of the seminar.
-
New visions for transportation and interaction. The seminar will focus on radical and innovative visions for the future of human transport and will employ innovation-centered approaches to foster out-of-the-box thinking.
-
Novel applications for AV technology. Perhaps the most significant contribution of the seminar should be novel applications for automated vehicle technology that will stretch the research and science community into new directions. We expect that in the coming 3 to 10 years, these new ideas should serve as inspiration for the research of the seminar attendees and, more broadly, the communities involved in designing automotive and mobility user interfaces.
-
Roadmap(s) for research. Another goal is the elaboration of a roadmap to outline proposed research collaborations and recommend new funding mechanisms. Furthermore, the roadmap should lay out plans for disseminating results such that members of our community are well informed, and such that they can effectively interact with researchers and practitioners in related communities, such as human-computer interaction, human-factors, user experience, automotive engineering, psychology, and urban/traffic planning.
Perhaps the most tangible and easy-to-communicate outcome of the seminar for other interested parties are short videos/video prototypes of ideas created over the week in group work. All of the videos were professionalized in the aftermath of the seminar and submitted, along with one short paper each, to the ACM AutomotiveUI conference, where three of the videos were accepted in the video track and shown to the audience at the conference in Seoul (videos are available as supplementary material in the ACM DL).
References
- [1] Nikolas Martelaro, Debargha Dey, Gary Burnett, Helena K. Strömberg, Jonas Andersson, and Andreas Löcken. 2022. How to Manage Social Order in Shared Automated Vehicles. In Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’22). Association for Computing Machinery, New York, NY, USA, 201 – 203. https://doi.org/10.1145/3544999.3550154
- [2] Kai Holländer, Lutz Morich, Natasha Merat, Gary Burnett, Virpi Roto, Wendy Ju, and David Sirkin. 2022. Radical Innovations in Future Mobility and Virtual Assistants. In Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’22). Association for Computing Machinery, New York, NY, USA, 209 – 211. https://doi.org/10.1145/3544999.3551501
- [3] Regina Bernhaupt, Mark Colley, David Goedicke, Alexander Meschtscherjakov, Bastian Pfleging, Andreas Riener, and Shadan Sadeghian. 2022. A Critical Perspective on Radically Innovating Personal Mobility. In Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’22). Association for Computing Machinery, New York, NY, USA, 215 – 218. https://doi.org/10.1145/3544999.3551689
2 Table of Contents
3 Overview of Talks
3.1 If and how AI can replace the authority figure of a human driver
Jonas Andersson (RISE Research Institutes of Sweden – Göteborg, SE)
License: ![]() Creative Commons BY 4.0 International license © Jonas Andersson
Creative Commons BY 4.0 International license © Jonas Andersson
Some of my current research interests include remote monitoring and operation of different types of vehicles and how the system-of-systems of humans, technologies and organisations evolve as the development of autonomous vehicles progress. Currently, most autonomous vehicles require a human safety operator inside the vehicle, and autonomous vehicles without a human “fallback” might be distant. At the same time, having a human safety operator inside autonomous vehicles contradicts the promises of autonomous driving transport efficiency. To bridge this gap, stakeholders are exploring remote monitoring and control. But remote operation comes with challenges, both from technical and human behaviour perspectives. The challenges entail both remote management and control per se, as well as the social impacts of removing the human driver since the human driver can also have a social function. This is true for public transport in particular. As the human authority in the vehicle is removed, there is a possibility to explore if and how AI can replace the authority figure of a human driver. At the seminar, deep discussions on human-automation interaction paradigms and conceptual solutions to the interaction design challenges we face with introducing this new technology. Social aspects of interactions were also discussed in-depth in different interactive sessions. For example, we explored possible futures people might meet in autonomous pods using video prototyping and enactment methodologies. The question explored was: What happens when drivers are removed, and may it be necessary for the intelligent vehicle to display authority, and how can that be done? Potential solutions were also developed, prototyped and played out in a characteristic setting of daily travel where we wanted to extend the perception of autonomous vehicles as they are often portrayed as always clean and having well-behaved travellers. To reflect real-life public transport, a situation where fellow passengers can be an annoyance was chosen as the use case. In this scenario, we wanted to highlight what might happen when the authority figure in the vehicle (bus or tram driver) is removed and illustrating it in a short video is an effective way to disseminate results accessible to academics, industry professionals and the public alike.
The experience I take with me from the week at Dagstuhl is that of a warm and welcoming community with an immense amount of knowledge, understanding and ideas about the future of human mobility. My motivation for joining the Dagstuhl seminar was to experience the opportunity of having in-depth discussions without the time constraints typically found in meetings and conferences and that definitely came true. Having prior experience in remote operation human factors research, the seminar has given me the inspiration to broaden my design methodological approach in this field towards a more explorative stance. The seminar has also expanded and enriched my professional network and opened many new possibilities for future collaborations.
3.2 The Metaverse of Driving
Gary Burnett (University of Nottingham, GB)
License: ![]() Creative Commons BY 4.0 International license © Gary Burnett
Creative Commons BY 4.0 International license © Gary Burnett
My research interests focus around the Human Factors issues for future vehicles, which has increasingly considered the complex design challenges associated with higher levels of autonomy in cars and other forms of personal and shared mobility. More recently, I have also become interested in the huge potential of social VR (and associated Metaverse technologies), primarily as a “radical” research method, but also as a means to engage with my students in Higher Education teaching. In this year’s Dagstuhl seminar, conducted in the current hiatus in the Covid-19 pandemic, there are obvious reasons to consider how we can conduct human-centred research in such a way that our participants are physically remote from us (and each other) but still present and fully engaged in a space – collecting both qualitative and quantitative data. As always, I have thoroughly enjoyed my Dagstuhl experience, reuniting with old friends and forming new collaborations. A particular highlight was the video prototyping session where our team articulated a key research question for future shared autonomous vehicle mobility, and envisaged several interesting and novel scenarios and solutions all in a matter of hours and documented within a 2-minute video. This was a highly creative and social exercise – something I’d forgotten how much I missed during the last 2 years of disruption. I also was reminded of the huge importance of in-person incidental conversations that occurred outside of scheduled work (usually while eating/drinking). In a specific example, during an evening meal I realized that everyone on my table was extremely knowledgeable in the area of external human-machine interfaces for autonomous vehicles (some being world experts). This was significant to me personally, as my team in Nottingham is currently designing a field study on this particular topic. In summary, the Automotive User-Interface community will increasingly be looking to the Metaverse as inspiration for future autonomous vehicle research. Moreover, in these uncertain times, the massive value of extended in-person seminars has been reinforced to me in this last week. I am looking forward to attending more seminars on autonomous vehicles in future years.
3.3 The Role of Communication and Computational Advances Towards Accessible Automotive User Interfaces
Mark Colley (Universität Ulm, DE)
License: ![]() Creative Commons BY 4.0 International license © Mark Colley
Creative Commons BY 4.0 International license © Mark Colley
Mobility is an important aspect and a facilitator of industry, academia, and general life quality. Automation efforts offer possibilities toward economic growth and increased quality of life for all people. However, mobility also contributes to phenomena such as global warming due to its reliance on fossil fuels. Additionally, current mobility often treats accessibility as an afterthought. Automation, and with it the fundamental changes in mobility, are, therefore, transformative and must thus be carefully planned, designed, and evaluated. For example, automated vehicles propose novel research and design challenges in the social-technical systems due to their encounters with vulnerable road users. This has led to the formation of a novel subfield of research towards this communication (e.g., [1]) and also regarding the definition of novel taxonomies more appropriate to this context [2]. While automation is often viewed with a singular focus on improved user experience of the user, potentially enhanced via novel possibilities enabled via machine learning, the challenges currently faced could require a fundamental reshaping of mobility. One crucial aspect for equitable access is including accessibility from the start. This intersection, future mobility supported by novel computation advances to strongly support accessibility needs, is at the core of my work.
Therefore, this Dagstuhl seminar greatly helped understanding the numerous stakeholder perspectives and the various challenges – technical, political, design-related, human-factor-related. Based on the knowledge, experience, and vision of the participants, the great challenges of mobility were outlined – which will shape the research agenda for the future years.
References
- [1] Colley, Mark, Elvedin Bajrovic, and Enrico Rukzio. “Effects of pedestrian behavior, time pressure, and repeated exposure on crossing decisions in front of automated vehicles equipped with external communication.” In CHI Conference on Human Factors in Computing Systems, pp. 1-11. 2022.
- [2] Holländer, Kai, Mark Colley, Enrico Rukzio, and Andreas Butz. “A taxonomy of vulnerable road users for hci based on a systematic literature review.” In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, pp. 1-13. 2021.
Contribution to Novel Users Panel
Moderated by Prof. Riener, a panel consisting of Regina Bernhaupt, Mark Colley, Andreas Löcken, and Nikolas Martelaro discussed the possibilities of future users of automated mobility. In this panel, questions regarding current challenges and possible avenues to a more equitable future were discussed. The questions were especially:
-
What new user groups can automated driving open up?
-
What would be prerequisites for a successful integration into future transport?
-
What accessibility problems are currently present in private/public transport?
-
What would be a radical innovation for blind people in future mobility?
-
How to ensure all people have access to future mobility?
The panel and the attendees identified interesting avenues for future methodical, educational, and human-factors-related research areas. Especially relevant are the requisites of designing not for a “standard” user but for a user range. The according tools and evaluation protocols for such designs were proposed as a highly relevant research direction. This includes software-defined vehicles both for appropriating hard- as well as software needs.
Schemes for Collaboration
Ulm University with Human-Computer Interaction Institute – Carnegie Mellon University – Nikolas Martelaro
Based on a common research interest in supporting the analysis of driving-related data, the future development of an analysis tool for rich data and metadata in the automotive domain is envisioned. This collaboration could include requirements analysis of the tool, workshops on usability enhancement, and data sharing for the advancement of understanding user behavior both in manual and automated driving.
Ulm University with Centre for Accident Research & Road Safety, Queensland University of Technology, Brisbane, CRICOS 00213J, Australia – Ronald Schroeter
The Centre for Accident Research & Road Safety currently evaluates automated vehicles and their behavioral impact. This includes the recording of numerous variables related to the driving task as well as the driver or user state. Prior to this, a vehicle was developed that is allowed to drive on various roads. The rich information logged by these vehicles can be used for deeper analysis and to guide future research in domains such as computer vision or interaction with automated vehicles.
Ulm University with RISE Research Institutes of Sweden – Jonas Andersson
Until automation capabilities become so advanced that a truly autonomous service is supported, that is, path planning, path execution, interaction with vehicle users, moderation for varying needs, handling of all imaginable situations, and maintenance work planning, some degree of human supervision is necessary. Currently, the arrival of this future is not predictable. Therefore, to still benefit of the advancements in technology and with the pitfalls of supervising automation in mind, remote control is developed and evaluated both from a technical and a Human Factors perspective. In this potential collaboration, remote control interfaces intended for multi-vehicle and/or multi-supervisor should be developed, implemented, and evaluated.
Ulm University with Cornell Tech – Wendy Ju and David Goedicke
Based on the simulators developed by David Goedicke and Wendy Ju at Cornell Tech, the evaluation of numerous aspects regarding the interaction with an (automated) vehicle is possible. For example, a real vehicle equipped with AR glasses can be used to study braking behavior for simulated crossings of pedestrians, the interaction with real forces within the vehicle, or as a tool to use with a Wizard-of-Oz approach for the participants to take the place of the pedestrian. This enables the evaluation and assessment of numerous concepts designed and evaluated in Virtual Reality.
3.4 Radical Innovation and Design for Connected and Automated Vehicles
Regina Bernhaupt (TU Eindhoven – Eindhoven, NE)
License: ![]() Creative Commons BY 4.0 International license © Regina Bernhaupt
Creative Commons BY 4.0 International license © Regina Bernhaupt
When attending a workshop named Radical Innovation and Design for Connected and Automated Vehicles one of the key expectations is to find ways on how to design for connected an automated vehicles that will very likely be available in a not so distant future. What was impressive in our workshop was the change towards even more critically reflecting on the assumptions we make for such a radical shift. Where would be the revolution – and not only the small evolution.
Reflecting on develpments in socio-technical systems and on their design in the past 30 years, we structured our thoughts on three dimensions: (1) users and groups of users, (2) systems and technology, and (3) the stakeholders or companies. We were able to identify a set of critical aspects and assumptions that need to be discussed and focused on in the near future: The need of negotiation between stakeholders and companies and the users, in terms of overall goals for transportation and mobility, be it monetary or based on other key characteristics of society like health, well-being or sustainability.
For the planning horizon of 15 – 20 years it became clear to me, that this lovely and inspiring group in this workshop is currently designing technology that will be key in my early retirement years. This led to a shift in my reflections and focus: while a 15 to 20 year horizon is key for a researcher mid-career, my research contribution should be more on the evolution and the more immediate improvement as well as the lay-out of a framework that can guide today’s discussion.
Based on a number of brainstorming sessions and group work, I came up with a triangle depicting user, system and stakeholders and allowing to group the various discussion points and possible conflicting requirements in one central figure. It can be a basis to summarize the contributions and might lead to a better communication for researchers with varying research backgrounds (as experienced in the Dagstuhl seminar).
Regina Bernhaupt
Professor for Digital-Physical Data Interaction (Systemic Change)
Industrial Design
Eindhoven University of Technology
3.5 From interaction and interfaces to a holistic end-to-end experience
Debargha Dey (TU Eindhoven, NL)
License: ![]() Creative Commons BY 4.0 International license © Debargha Dey
Creative Commons BY 4.0 International license © Debargha Dey
It is interesting to observe how the core focus of our discussion is gradually shifting from designing for interactions and interfaces of the personal automobile to designing for a holistic end-to-end experience of smart and sustainable mobility. The future of mobility points increasingly in the direction of shared mobility and the gradual phasing out of the personal car. Public transport offer several benefits such as sustainability, better economic viability, and reduced environmental impact. However, this also comes at a cost of aspects such as convenience, flexibility, privacy, and speed. Here, the question arises: to what extent can the “sacrifices” to personal convenience and comfort be addressed and/or mitigated? The benefits of end-to-end, seamless mobility afforded by personal vehicles soon disappear when adapting to the currently fragmented nature of public transport that is often plagued by unpredictability, lack of flexibility, and lack of support for first/last mile conveyance. Ignoring the emotional aspects of car ownership (in terms of attachment to a car, or the thrill and feeling of freedom), I believe that these core practicality aspects of individual car ownership needs to be addressed for us to be even remotely successful in realizing this vision. I see this therefore as an interesting but uphill challenge (problem statement) for us interaction designers, HCI researcher, and policy experts to consider and address. Undoubtedly, the next decade(s) will see some unprecedented innovations in terms of mobility (combination of new powertrains/electric propulsion, connected and automated driving, and MaaS) leading to radical disruptions in the realization of sustainable mobility.
3.6 What could radical innovation for transportation look like?
David Goedicke (Cornell Tech – New York, US)
License: ![]() Creative Commons BY 4.0 International license © David Goedicke
Creative Commons BY 4.0 International license © David Goedicke
The activities in the workshop focused on understanding how transportation can be solved in this new environment. A new environment that requires is filled with companies pushing for automation, a public that demands “greener” technologies, and a global political situation that restricts access to traditional energy sources.
Through discussion with the different experts that joined the conference, it became apparent that a new radically new perspective is necessary. The future of individual transport was taken under scrutiny and modern concepts of transport were explored and envisioned (like on-call bus services, ride-sharing concepts etc.).
Even though the perspective was on finding modern solutions, a substantial amount of time was also spent on disassembling techno-optimist solutions to the current transportation problem. It became evident that car manufacturers are having difficulty changing their strategy. Modern idealized transportation concepts are often present in a simplified view and, even worse, often ignore marginalized uses of private transport (Home health workers).
The activities in the seminar, from walks to movie nights to board games, created an overall collegial environment and even a playing field where everyone contributed. The fact that multiple videos produced during this week are planned to be submitted to the AutoUI conference speaks to the progress made this week.
Personal note
As a finishing Ph.D. candidate, participation in such an event was most useful to better understand European academic systems, plot the next steps, and get exposed to higher-level planning processes that are often part of running a research lab.
3.7 Radical perspectives on the future of mobility
Kai Holländer (LMU München, DE)
License: ![]() Creative Commons BY 4.0 International license © Kai Holländer
Creative Commons BY 4.0 International license © Kai Holländer
In this work we show novel approaches to fully automated driving.
On the mechanical side, we propose to build modular cars which are split in multiple subsystems and allow for a multitude of different combinations to fit the user, usage context, application area and environment. In addition, we present the idea of a digital agent which helps travelers to decide on means of transportation in accordance to their individual preferences, such as using green modes of transport, their budget, supporting privacy during the journey or travelling as fast or convenient as possible. The focus of the agent lies on seamless interaction of different modes of transport where cars driven on fossil fuels get excluded as much as possible.
We believe these ideas form a base for future research in the mobility domain.
3.8 Transforming Experiences in Transportation
Wendy Ju (Cornell Tech – New York, US)
License: ![]() Creative Commons BY 4.0 International license © Wendy Ju
Creative Commons BY 4.0 International license © Wendy Ju
The key insight I gained from the Dagstuhl workshop on Radical Innovation in Connected and Autonomous Vehicles is that we need to re-invent the experience people have with transportation. Currently, people are solving a lot of their problems with the “silver bullet” of their personally owned car. They might appreciate that this solution comes at some cost – to the environment, to their health, to their everyday routines – but also it allows them to get to work, to explore the world, to meet with people, and to enjoy their lives.
I believe it is possible to help transition people to finding new ways to solve their problems, so that they might reduce or remove their vehicle usage, to the point that they might not need personally owned vehicles at all. To do this, though, people need information about the myriad options for transportation and confidence about their ability to adopt new modes of mobility. To this end, I believe that we should consider ways to improve self-efficacy in mobility. Perhaps, for example, people need a travel concierge to help them brainstorm new ways to travel, and help them through the “but but but”s that keep them from trying and then adopting new travel. Key aspects of this need is to provide people with specific solutions to solve their specific issues – such as needing to transport children, or needing to arrive quickly or cheaply, being able to fit a meal or a workout.
Over the course of the workshop, we learned many ways of exploring and expanding ideas – design thinking, user enactments, remote ethnography, video prototyping, collecting field data. These skills were put to use in the development of an idea for a virtual agent to help people plan travel without personal cars. The super group of Natasha Merat, David Sirkin, rOnny Schroeter, Lutz Morich, Virpi Roto, Kai Hollander, and myself made a humorous video prototype of a virtual agent that aids future mobility for a person with disabilities who is planning a bank heist. I am excited to see the way that this group will build on the skills and methods learned in this week to tackle the great challenges that lie ahead in transforming people’s experience of mobility.
3.9 Are We Ready to Take Away People’s Cars?
Andreas Löcken (TH Ingolstadt, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Löcken
Creative Commons BY 4.0 International license © Andreas Löcken
Current challenges such as climate or demographic change point to a radically different future. To maintain (or even improve) our standard of living, we need to keep up. And what could be more radical (for automotive human-computer interaction researchers) than removing cars from traffic? Automated shuttle buses or personal “transportation-pods” may replace personally owned vehicles while being more sustainable and enabling more people to participate in traffic. In our own research, we focused a lot on how the automated vehicle should communicate with its passengers (e.g., [1]) or its surroundings (e.g., [2]. But will people accept “giving up” their cars? In my opinion, the most interesting challenges for a radically new future of mobility (that HCI researchers can tackle) will be to create inclusive solutions (and not “just” add accessibility options) and meet user experience needs that manually controlled vehicles will no longer provide. If we cannot give users an alternative to their cars, the industry has no incentive to provide the technology or stakeholders to update policies. The answer to the title is: “probably not”. I look forward to continuing the discussion in future workshops and seminars. I thank Wendy, Bastian, Andreas and the Dagstuhl organization for allowing me to make new contacts and deepen existing connections.
References
- [1] Andreas Löcken, Anna-Katharina Frison, Vanessa Fahn, Dominik Kreppold, Maximilian Götz, and Andreas Riener. 2020. Increasing User Experience and Trust in Automated Vehicles via an Ambient Light Display. In MobileHCI ’20: 22nd International Conference on Human-Computer Interaction with Mobile Devices and Services, Oldenburg, Germany, October 5-9, 2020. ACM, 38:1-38:10. DOI: https://doi.org/10.1145/3379503.3403567.
- [2] Debargha Dey, Azra Habibovic, Andreas Löcken, Philipp Wintersberger, Bastian Pfleging, Andreas Riener, Marieke Martens, and Jacques Terken. 2020. Taming the eHMI jungle: A classification taxonomy to guide, compare, and assess the design principles of automated vehicles’ external human-machine interfaces. Transportation Research Interdisciplinary Perspectives 7, 100174. DOI: https://doi.org/10.1016/j.trip.2020.100174.
3.10 Radically personalized mini-mobility automotive design
Nikolas Martelaro (Carnegie Mellon University – Pittsburgh, US)
License: ![]() Creative Commons BY 4.0 International license © Nikolas Martelaro
Creative Commons BY 4.0 International license © Nikolas Martelaro
To help reduce the impact of automobiles on traffic congestion and the environment, I believe there needs to be a shift towards smaller vehicles. To make this more agreeable to people, I also believe that there needs to be ways to make sure that such vehicles meet people’s needs. I suggest that this could be done through new design systems that help people to radically personalize their vehicles for their needs.
A current issue with today’s automobiles is that they are physically too large. As people begin to shift towards electric vehicles, I believe that we are also starting to further understand what our driving needs actually are and are thus changing what we believe we need in a vehicle. For example, a primary issue that many people have had with electric vehicles is they have too little range for their driving behavior. While this is true for some drivers, it is not true for many drivers, especially those who live in cities, as they may only drive short distances and thus would be ok with smaller vehicles with less range. Moreover, with the convenience of charging at home (for some), range becomes a low priority issue once a certain threshold of range capacity is reached (I hypothesize that this is about 240 KM of range). While new battery technologies that allow more dense energy storage should be explored, I believe that there is not as much of a need for creating physically larger vehicles to meet consumers; transportation needs.
If we can reduce the size of vehicles then, we can also reduce their impact on congestion on the road and while parked. While smaller vehicles are much more common in Europe, in the US, vehicle design is trending larger and larger. Much of this is likely based on consumer psychology as people get a vehicle for the 5% of driving that they do rather than the 95% of driving. For so long, vehicles were affordable enough that people could own a vehicle to express their identity. However, with rising manufacturing costs, vehicles are now going to be more expensive, making it harder for people to own the vehicles that they may desire. One way to combat such rising prices though is to reduce the material costs of a vehicle, for example by making smaller vehicles. Still, such small vehicles will need to have great designers in order to fulfill people’s physical needs as well as their psychological and aspirational needs. I believe that one radical further for personal automobiles is in highly personalized, ultra-compact cars that are designed specifically for every person to fit their needs. Such a future would likely require a few key technical innovations that require research and development.
First, EV drivetrains will likely need to be modularized so that the most expensive parts of a vehicle can be mass-produced and interchangeable with different body styles. Such technology is already in development with the concept of EV drivetrain “skateboard” platforms that allow different body styles to be bolted onto the skateboard frame. Second, we will need better ways of determining people’s physical needs in regards to range and functionality of a vehicle. While one may assume that people determine their own physical needs when choosing a vehicle, I am not as sure about this and believe that many people consider such needs but in more aspirational or speculative ways. Often, people drive alone on daily commutes and often do not take the long road trip with many people or haul lots of gear to go camping. I believe that there is research to do on how well people vehicle choices meet their physical needs. Such research might include quantified self research around driving habits and ethnographic studies at the scale of people’s use of their cars. I hypothesize that many cars are highly underutilized. Based on such research, I also believe that such ethnographic and data collection systems can be used for the design of new kinds of vehicles that do fit people needs. To accomplish such personalized design on a massive scale would require new kinds of design tools and likely computational assistance. Research into generative design systems may lead to new tools that can allow a person paired with a computational “designer” to create a car body/interior design just for them. Such systems could design vehicles for people who do transport many other people, or who go on trips to the woods to ski and camp, or who want to have a stylish vehicle to show off their personal tastes. One can even imagine that as people’s needs change over time they can change out their bolt-on bodies for new ones while keeping the same skateboard frame.
Such an idea is not without its potential issues and here I try to describe some that may need to be overcome when considering such a personalized automotive design future. First, what happens when a vehicle does not meet someone’s needs any more and must be resold? Will it be so personalized that it does not work for another user? Or will there need to be a service to find similar enough users who could then purchase a customized vehicle from another person? Or, are there ways to make modifications on a customized vehicle that allow someone to keep most of what is there and change out only key areas? Another issue is that of fulfilling driver’s needs when they do take the 5% of trips where their vehicle is not a good fit? This might be overcome with some innovation in car sharing / rental business models where people can rent the car they need for the few times a year that they need it. Finally, there is a question as to if more investment should be made into automobile travel or into other forms of transportation. I personally believe that we will need a diverse set of transportation options well into the future, however, such technologies that can help to understand people’s needs and personalize their car might also be the foundation for systems that can design personalized mobility plans for people that includes personal vehicles, public transportation, bicycling, and other forms of micromobility.
3.11 Designing the future automated vehicle: Including the excluded
Natasha Merat (University of Leeds, GB)
License: ![]() Creative Commons BY 4.0 International license © Natasha Merat
Creative Commons BY 4.0 International license © Natasha Merat
Background.
The vision for implementing autonomous (automated) vehicles (AVs) in our cities has been around since the 1980s. These new forms of mobility are proposed to be safer, more efficient, and more economical, helping to prolong the mobility of older and impaired citizens, making transport more sustainable, and cleaner. Currently, personally-owned versions of these vehicles, which can maintain the designated speed of the road, and keep within the lane, are available for specific road conditions – such as highways, during good daylight conditions, with clear weather, etc. An alternative model to this personal model, is a shared automated vehicle (SAV), with no driver controls, but controlled by a safety driver inside the vehicle – e.g. with a joystick, or remotely, by a human operator. These shared automated vehicles typically operate in designated urban areas, such as airports, carparks or hospital/shopping grounds. Despite the plethora of effort and $$$ spent on the development of these vehicles in the past 40+ years, a number of key barriers currently exist, which prevent their mass deployment, acceptance and adoption. These barriers are partly based on inadequate technological advancements, such as imperfect cameras, sensors and radars, which are not yet 100% reliable in all road and weather conditions, and are particularly challenging in rural settings, or a mixed traffic environment containing other (manually driven) vehicles, as well as cyclists, pedestrians and users of other micromobility services (collectively termed Vulnerable Road Users, or VRUs). In addition to such technological challenges, the “everywhere, all the time” vision for AVs is currently not feasible, because they do not meet the needs of all citizens, with particular challenges for accessibility, inclusion, and affordability.
Motivation.
My motivation for attending the Dagstuhl Seminar on “Radical Innovation and Design for Connected and Automated Vehicles”, was to have the opportunity to meet colleagues from moderately different research backgrounds, and discuss the challenges which currently exist for the deployment of AVs with a group of experts from Europe and North America, using a diverse range of research methods and philosophies. I was also very excited and honoured to join a meeting structured around scientific debate and discussion, which my busy diary has not allowed me to experience since my PhD days, 25 years ago!
Vision and Methodology.
The vision for the meeting was for each group member to outline their areas of interest in this field, defining the problems that need to be addressed before mass deployment of AVs is a possibility, and the timeline for addressing these problems. A wide range of interests, focusing on new design solutions for the user, and outlining the role of society and policy (rather than technology) were identified, and discussed. Three main themes were developed from this diverse range, for further debate amongst smaller groups. These included: 1) A policy push for removal of all personal vehicles from our roads by 2032, and the introduction of shared automated vehicles and alternative forms of transport, 2) Better understanding and coordination between high levels of automation and drivers, and 3) creation of a modular, personalised vehicle of the future. Some of these ideas were then taken further to create short demonstration videos, illustrating the solutions offered for a radical change in the mobility of the future.
Main takeaways.
Interacting with an almost completely new team of researchers was enlightening, exciting, and super rewarding. I may have started on a slightly different page, but quickly learned to see the benefits of different approaches and the contribution of different disciplines, learning the value of new and different research tools and methods. Solving problems in a team with peers (rather than students) was also very special, especially after 2 years of lone working, due to COVID-19. Professor Natasha Merat, Chair in Human Factors of Transport Systems. Institute for Transport StudiesUniversity of Leeds
3.12 Radical Innovations for Future Vehicles Needs Radical Methods and a Holistic Understanding of Users, Stakeholders and Society
Alexander Meschtscherjakov (Universität Salzburg, AT)
License: ![]() Creative Commons BY 4.0 International license © Alexander Meschtscherjakov
Creative Commons BY 4.0 International license © Alexander Meschtscherjakov
When debating future mobility concepts there is always a tension between the doable and thinkable. One way how to look at the future is to expand it from the past and think of how the future may evolve. In the context of automated vehicles this is often done through the lens of automation levels. Coming from manually driven vehicles (level 0) lateral and longitudinal control of the vehicle, as well as the necessity to observe and react to the environment are omitted. At level 1 the vehicles accelerate and break by means of ACCs or keeps the lane by utilizing lane-keeping assistance systems. On level higher the vehicle does the driving and the driver “only” needs to observe the environment and react if necessary. On level 3 non-driving related tasks (NDTR) are possible, but the driver needs to react to take-over-requests (TORs). Higher level (i.e. 4 and 5) even relives drivers from any driving activity allowing them (maybe) to intervene in tactical driving decisions (e.g. shall the vehicle overtake or not) and strategic ones (e.g. telling the automated vehicle where to go). Increasing levels allow us to think of different kinds of transport systems. Vehicles evolve and become more and more autonomous. This is one way to do it.
Another way is to come from another point of view: thinking of and exploring solutions by asking “What if” questions. This allows us to re-think the future of mobility more radically. But what are good “What if” questions? How far do we have to go to be radical enough? Whom do we have to involve in this process? This Dagstuhl seminar was a starting point for me to think about radical changes in our premises leaving (hopefully) to novel insights on how the future of mobility could look like. Questions that have been (or will be) tackled are the following:
-
What if all public transport would be free of costs for people who use it?
-
What if we prohibit people of owning their own vehicle?
-
What if we forbid individual cars at all?
-
What if we get rid of all streets?
-
What if we forbid manually driven vehicles?
By making this “what if” statements to our premise we were forced to come up with radical new solutions but also by looking at problems that may arise for individuals triggered by these radical changes.
3.13 Abstract on Seminar „Radical Innovartion and Design for Connected and Automated Vehicles”
Lutz Morich (frE3-innovations, DE)
License: ![]() Creative Commons BY 4.0 International license © Lutz Morich
Creative Commons BY 4.0 International license © Lutz Morich
As a novice and industry participant at a Dagstuhl seminar, all estimates and impressions are based on an absolute jumping off basis without relative comparison to comparable seminars.
My goals before the seminar were the following:
-
1.
broaden my perspective regarding mobility (narrow due to industrial background)
-
2.
networking with mobility research experts in academia
-
3.
learning methods for innovation and knowledge generation
My main takeaways: My expectations were exceeded by the very diverse group from the science of HCI in combination with mobility issues. My dull glasses of industrial imprinting have wich not only cleared up but also significantly expanded. Through the dynamic composition of working groups in connection with challenging and innovative methods, both my goal of networking and methodological competence enhancement was fulfilled. Connections and perspectives have emerged that promise a closer cooperation of my private economic background with science in the field of automated and networked mobility in the future in a general and concrete way.
Lutz Morich
frE3-Innovations
Josef-Fleischmann-Str. 7
85139 Wettstetten
Tel.: +491605739144
Lutz.Morich@fre3-innovations.com
3.14 Radical Innovation and Design of Future Mobility – Where should we head?
Bastian Pfleging (TU Bergakademie Freiberg, DE)
License: ![]() Creative Commons BY 4.0 International license © Bastian Pfleging
Creative Commons BY 4.0 International license © Bastian Pfleging
Human mobility has massively changed throughout the last centuries. Humans had used horses (or similar animals), horse-drawn carriages, or just their own feet to get to a destination for thousands of years. This hugely limited individual mobility and only with the invention of bicycles, trains, cars, busses, and trucks humans gained mobile flexibility and this massively extended their motion range. Vehicle automation, climate change, and novel drive technology are expected to again change to a large extent how we will use and experience mobility.
There is a variety of concepts for automated cars and how mobility could look like in the future (e.g., 2030 or 2050). This includes concepts of automated individual vehicles and shared mobility using various types of vehicles. What many of these concepts have in common with current research and development practices is that they rely on rather incremental and evolutionary steps. An open question is whether this approach is suitable to use or whether radical innovation and design could be more suitable.
Looking at other fields such as communication industry and especially phones, the history of the phone shows that a similar evolutionary approach was used multiple times: operators were replaced by machine switching, wireless phones at home replaced traditional fixed phones (=the user got rid of the phone cord) and later traditional mobile phones (“feature phones”) offered mobility to their users as they were able to use their phone not only at a fixed location but everywhere. For quite a while, such phones were improved incrementally to satisfy specific user needs (e.g., longer standby time, better sound quality, …). The introduction of the smartphone instead can be seen as a more revolutionary step, since prior achievements or principles (e.g., standby time, privacy) were sacrificed for a novel type of device (large touch screen) and an ever-increasing App ecosystem. As history now tells, the gained benefits of smartphones outweighed the user need for week-long standby times and former global players, who sticked mostly to their good old feature phones, became mostly meaningless with regard to phone production. Another interesting aspect in communication industry can be found when looking at today’s business models for mobile phone (operating) systems when looking at the two biggest players and ecosystems: What both have in common is that they offer large App ecosystem. One of the biggest difference between them is that one generates revenue from selling a combination of hardware (phone) and operating system, while the other one mostly offers a free operating system (leaving production of hardware to other companies) while generating revenue from collecting and using data with all its pros and cons.
The previous case of the mobile phone sector, where the business has change massively during the last decades, raises a few questions for the automotive field:
-
What does it need to prevent current players in (automotive) mobility from becoming the “next Nokia” and instead contribute successfully to novel forms of mobility?
-
What are the consequences of different business models and how do they affect society?
-
How can we ensure to develop future mobility in an ecological way where users, society, and environment are first and business/revenue are only second?
Taking the experience from the smartphone sector into account, also related to market power, I consider it essential that we do not make the same mistakes again that happened in the phone industry when it comes to (re-)inventing future mobility. Thus, I hope that the discussion and ideation of how our mobility will look like in the next 10, 30, or 50 years happens equally in industry, society, and academia. With the outcomes of this Dagstuhl seminar, I hope that we can contribute to and stimulate this discussion.
I thoroughly enjoyed to be back at Dagstuhl in person and discuss our ideas and perspectives with old and new collaborators. What I found remarkable is that the focus of the seminar shifted very quickly into novel directions such as “what if … the individual car will/needs to disappear” and it was a pleasure to discuss creative solutions and approaches to radical changes in the mobility sector with all attendees.
3.15 Radical Innovation and Design for Connected and Automated Vehicles
Andreas Riener (TH Ingolstadt, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener
Creative Commons BY 4.0 International license © Andreas Riener
Joint work of: Andreas Riener, Bastian Pfleging, Wendy Ju
We met for a week in Dagstuhl to discuss radical innovation approaches to change future transport, to identify problems, and to develop solutions. The aspects and dimensions brought in were diverse and the discussions from different perspectives very fruitful.
But we also realized how difficult it is to break out of the “normal” iterative development process and think “radically” or “innovative”; after numerous presentations, discussion rounds, panels, prototyping workshops and, of course, evenings in the wine cellar of Schloß Dagstuhl, we gave birth to great ideas to revolutionize (individual) transport in the future. At the same time, however, we have also realized that there are a number of obstacles to be cleared out on the way to more sustainable mobility. On the one hand, car manufacturers and the automotive lobby are strong advocates of individual cars and it will be difficult to initiate the rethinking process there. On the other hand, political decision-makers also need to be convinced to launch new forms of mobility.
Today, however, at the end of the seminar, we are confident that we will be able to influence future decisions and implement some of the ideas developed in the seminar. More on the short-term, some ideas for bilateral/multilateral collaborations, research exchanges and last but not least, conference papers and grant proposal have emerged.
Thank you for the opportunity to organize this seminar in Dagstuhl and to let all these creative, innovative minds work on problems of the future for one week and to foster personal interaction after a long time of remote meetings.
The Game is NOT Over – we are coming back!
Andreas Riener Co-organizer of Dagstuhl Seminar 22222
References
- [1] Anna-Katharina Frison, Andreas Riener, Myounghoon Jeon, Bastian Pfleging, and Ignacio Alvarez. 2018. Workshop on Designing Highly Automated Driving Systems as Radical Innovation. In Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18). Association for Computing Machinery, New York, NY, USA, 37 – 43. https://doi.org/10.1145/3239092.3239097
- [2] Anna-Katharina Frison, Philipp Wintersberger, Andreas Riener, and Clemens Schartmüller. 2017. Driving Hotzenplotz: A Hybrid Interface for Vehicle Control Aiming to Maximize Pleasure in Highway Driving. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’17). Association for Computing Machinery, New York, NY, USA, 236 – 244. https://doi.org/10.1145/3122986.3123016
- [3] Anna-Katharina Frison, Bastian Pfleging, Andreas Riener, Myounghoon Philart Jeon, Ignacio Alvarez, and Wendy Ju. 2017. Workshop on User-Centered Design for Automated Driving Systems. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications Adjunct (AutomotiveUI ’17). Association for Computing Machinery, New York, NY, USA, 22 – 27. https://doi.org/10.1145/3131726.3131734
3.16 Experience goal-driven design
Virpi Hannele Roto (Aalto University, FI)
License: ![]() Creative Commons BY 4.0 International license © Virpi Hannele Roto
Creative Commons BY 4.0 International license © Virpi Hannele Roto
Radical innovation requires powerful innovation methods. Through some years of development and testing, we have developed the concept of experience goal and the method of experience goal -driven design. In this seminar, we experimented using the method on innovating future vehicles. Pairs of participants started by defining experience goals for a given use case, e.g., Eric, 75y, having Covid-31 and needing transportation to hospital. What kind of emotional needs does he have? An experience goal should communicate the experience or psychological need that the person has in the situation. The experience goal should then drive the idea generation: what kind of future vehicle could enable the experience goal to realize? In this case, the group found it is important to support feelings of safety and being nurtured. The social needs include contacting the closest people and informing about the status.
3.17 Individual and social experiential aspects in the design of automated vehicles
Shadan Sadeghian Borojeni (Universität Siegen, DE)
License: ![]() Creative Commons BY 4.0 International license © Shadan Sadeghian Borojeni
Creative Commons BY 4.0 International license © Shadan Sadeghian Borojeni
Mobility is both a desire and a necessity. Mobility practices, such as commuting to work, shopping, or, traveling to visit loved ones are an integral part of our everyday lives. Currently, a large proportion of these practices are performed through manually driven vehicles. With the rise of driving automation, however, these practices will change. Driving automation promises to relieve people from driving-related tasks and provide them with the opportunity to engage in non-driving-related activities. To fulfill this, of course, the automated vehicles should ensure safety and reliable maneuvering which requires systems that are able to sense and understand the environment and act flawlessly. This pragmatic aspect of automated driving has been researched in the last decades. It is nevertheless, important to investigate how these automated vehicles change the mobility practices and what experiences emerge through their use. This as well raises the question of whether the new practices are accepted by users and can be integrated into their everyday lives. While the decisions related to the design of technology for automated vehicles are mostly technical, they have social consequences. Creating technology that forces users to follow rules that the designers have planned for them without considering their individual needs or social norms can create a host of negative experiences. Therefore, the design of automated vehicles should consider the individual and social experiential aspects besides the pragmatic and safety-oriented factors.
3.18 Friendly metaphors for human-AV interaction
Ronald Schroeter (Queensland University of Technology – Brisbane, AU)
License: ![]() Creative Commons BY 4.0 International license © Ronald Schroeter
Creative Commons BY 4.0 International license © Ronald Schroeter
My interests are to make Automated Vehicles safe and fun to use, so I attended the seminar to be inspired to explore new ideas to that end. Here is what I walked away with: Let’s apply a “dog” metaphor to future Automated Vehicle (AV) design! Dogs have an innate connection to human behavior. They are receptive to their owner’s cues, sense their owner’s feelings or moods (or “states”), adjust or tailor their behaviour accordingly, and even probe their owners for explicit cues or responses when needed (by lifting paws, making sounds, nudging, etc.). As a result, humans develop a deep connection to their dog. How can we create such deep connections in the context of human-AV interaction, and opportunities for mutual learning processes?
We propose a vehicle decision-making framework that incorporates cues obtained from the vehicle user and an adaptive multimodal HMI (human-machine-interface, considering all human senses, so including vehicle dynamics) that probes the user. The framework integrates the user’s state (attention, arousal, stress, …) and the external environment (complexity, planned path & maneuvers) while making operational decisions, and applies active interventions on user states. This bi-directional, adaptive tuning mechanism or “language” between AV and user, may then potentially be used to
-
enhance safety (aligning cognitive state with environment requirements),
-
improve user experience (aligning with or playfully manipulating emotional states),
-
create user profiles that optimise AV behaviour, and
-
improve user experience.
3.19 Prototyping Interactions with Autonomous Vehicles in the Field
David Sirkin (Stanford University, US)
License: ![]() Creative Commons BY 4.0 International license © David Sirkin
Creative Commons BY 4.0 International license © David Sirkin
Fully or partially autonomous vehicles are a rich but vexing context for interaction designers to study in real road contexts. On one hand, their design draws on established lines of research in physicality and human factors, and in psychology and perception. On the other hand, for now, real autonomous vehicles are difficult to acquire and program, and thus apply to interaction design research questions. One approach is to use Wizard of Oz prototyping, typically hiding a human driver, which can work for participants both inside and outside of the vehicle.
Monday’s tutorial focused on collecting field data in the context of Wizard of Oz prototyping of human-vehicle interactions in the field. We covered several examples of prior studies, which led to both the kinds of findings we were looking for1 (about deceleration profiles, pedestrian perceptions) and those we had not expected2 (that some road users “grief” autonomous vehicles). These experiences suggested the value of many hours spent selecting and driving in various contexts to capture a breadth of behaviors. The conversation quickly moved to sharing practical tips during field work, such as the amount of time needed to plan a field study, the daily setup and breakdown of equipment, a suitable number of interviewers for each outing, alternative ways to design questionnaires, and how to increase participation from passers-by, such as offering to walk along with those who are reluctant to stop and talk with interviewers.
My personal goals for the program were to meet human factors experts, computer scientists, engineers, and other designers, share our research methods, and plan future collaborations. While the program had many organized activities, these 2 goals were those where I focused most of my effort and have already found the most value.
References
- [1] Moore, D., Currano, R., Strack, G. E., & Sirkin, D. 2019. The case for implicit external human-machine interfaces for autonomous vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 295 – 307.
- [2] Moore, D., Currano, R., Shanks, M., & Sirkin, D. 2020. Defense against the dark cars: Design principles for griefing of autonomous vehicles. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, 201 – 209.
3.20 Radical mobility innovations for a messy everyday life in the future
Helena K. Strömberg (Chalmers University of Technology – Göteborg, SE)
License: ![]() Creative Commons BY 4.0 International license © Helena K. Strömberg
Creative Commons BY 4.0 International license © Helena K. Strömberg
My research interest is driven by a vision of sustainable everyday mobility, where mobility is something that allows people to go where they need to be and do what they need to do, and where people have equal access to functions in society, healthy environment, and safe, appropriate, and effective ways of getting around. Partial or full automation of vehicles can play a part in facilitating such a future vision, but it is necessary to investigate how and where to best implement automation so that society can gain the most benefits from it – to potentially radically rethink the way the mobility system is built today.
Currently, there is a strong technology push in relation to automation, and a weak societal pull or engagement. There are risks associated with this dynamic, as technology becomes implemented where it is possible instead of where it is beneficial. Research and industry efforts are then spent trying to handle the resulting consequences of this sub-optimal implementation, including overtrust in automation, managing sudden and dangerous handovers and the difficulties in communicating among different road users. There is a need to take a step back and look at the interplay between humans and automated systems from a more comprehensive and multi-stakeholder perspective. Which role(s) in mobility should automation play, and which should be played by humans? During use, which actions should be done by whom? And who should make which decisions and take which responsibilities? Taking a step back will open up the design space to not only create radical technical inventions, but also truly radical innovations that are implemented in a way that benefits both society and the environment.
A radical rethink requires a combination of critical and creative approaches, and multiple perspectives. My motivation to join the seminar is to meet new people (and old acquaintances) to get new ideas for approaches and clash my perspectives against others, and in the long term create new collaborations. I am especially interested methods that allow us to explore an unknown future in such a way that we can explore the consequences for interaction, use and society at large. My previous experiences include enacted and real-world trials of mobility solutions, with the intended users in their intended contexts, as well as more future-oriented and speculative approaches using provocative enactments and prototypes to evoke a discussion on the desired future. It would be interesting to find other ways of exploring future practices, to predict, enact and evaluate that practice in advance, in order to understand if ideas will be useful and valuable in the future.
This seminar has explored multiple ways of doing so. At the same time, the activities and mix of interests represented has pushed us into a simultaneously critical and open mind to the visions of the future available in the world or that we can come up with ourselves. This fruitful exercise has allowed us to find the faults in our thinking, challenge our assumptions and realise who we have included and excluded in the future, Importantly, this leads to the realisation that people will still be people in the future, lives will be messy and any radical mobility solution must cater to many conflicting interests
I come away from the seminar with a renewed interest for research into the experiences and relationships that forms with, within and beyond the vehicle, validating the work I and my research group have investigated previously. I am also empowered by the discussions that more people (in a car dominated research area) feel the need to challenge the car or even get rid of it altogether. However, it is important not to lose track of the important role that personal cars can play – it is, and most likely will be, a part of the diversity of solutions that are a key to successful sustainable everyday mobility in the future.
4 Workshop Activities
4.1 Welcome to Dagstuhl seminar 2222: Opening and Brainstorming
Andreas Riener (TH Ingolstadt, DE), Wendy Ju (Cornell Tech – New York, US), and Bastian Pfleging (TU Bergakademie Freiberg, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener, Wendy Ju, and Bastian Pfleging
Creative Commons BY 4.0 International license © Andreas Riener, Wendy Ju, and Bastian Pfleging
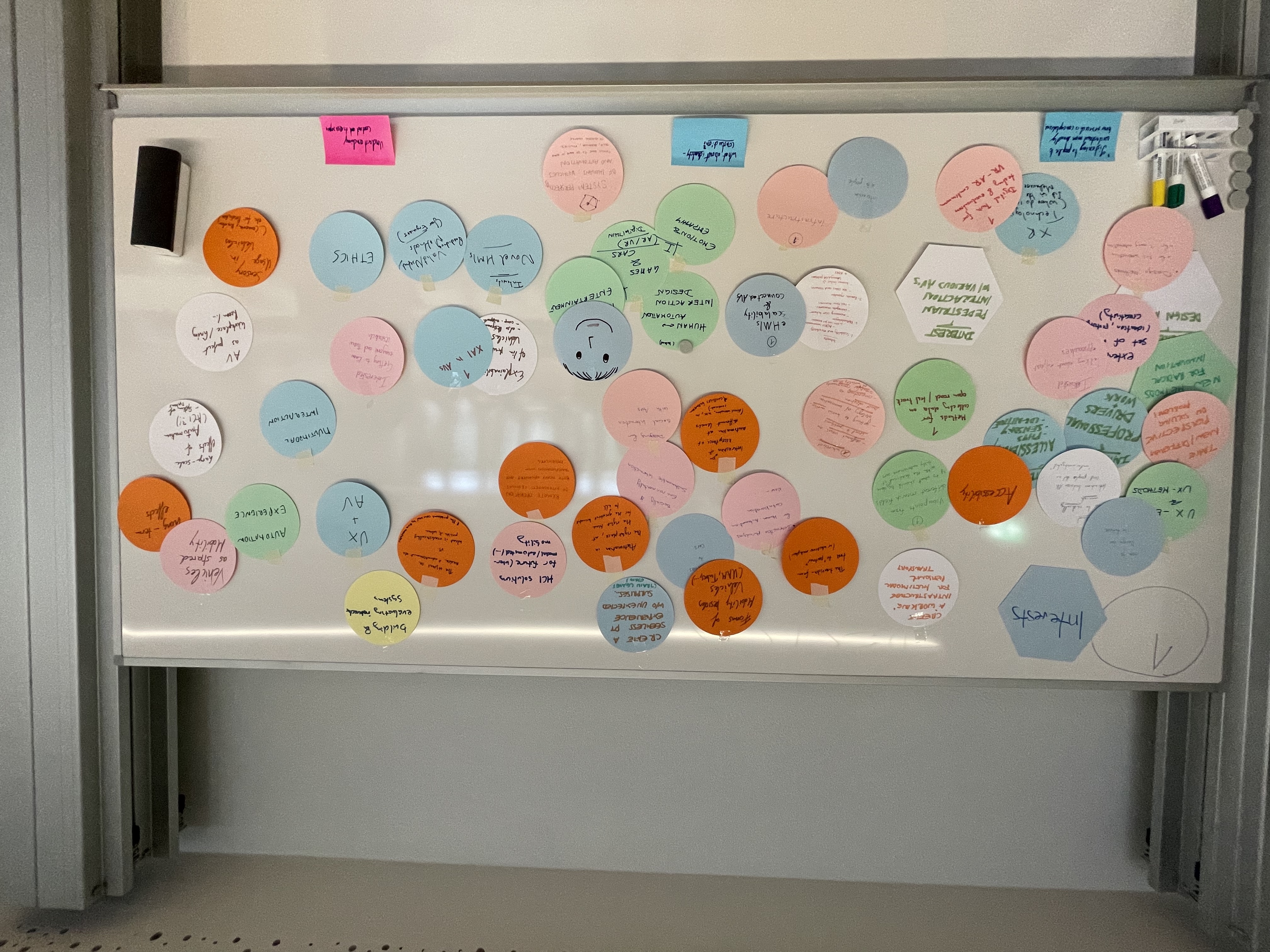
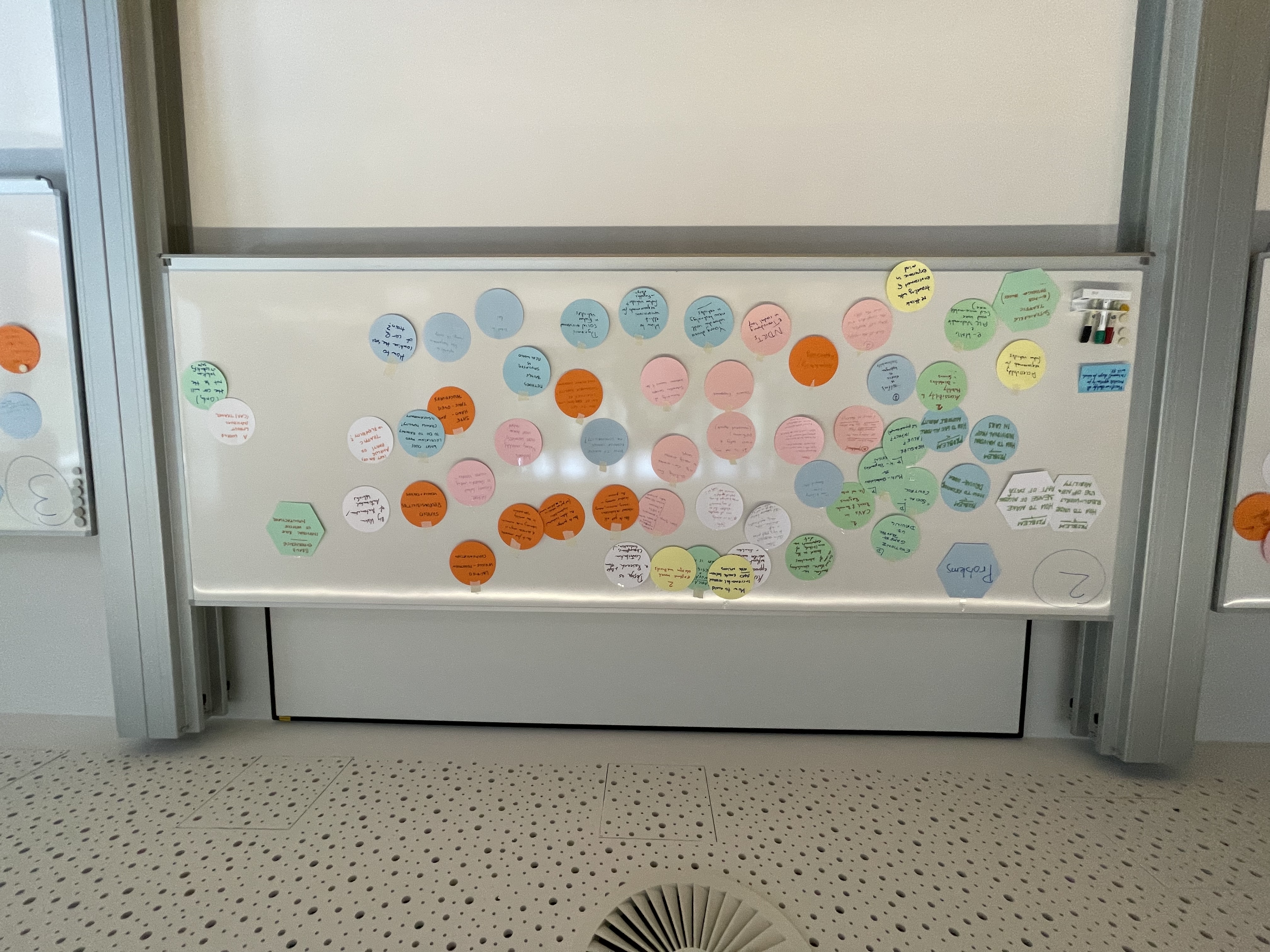
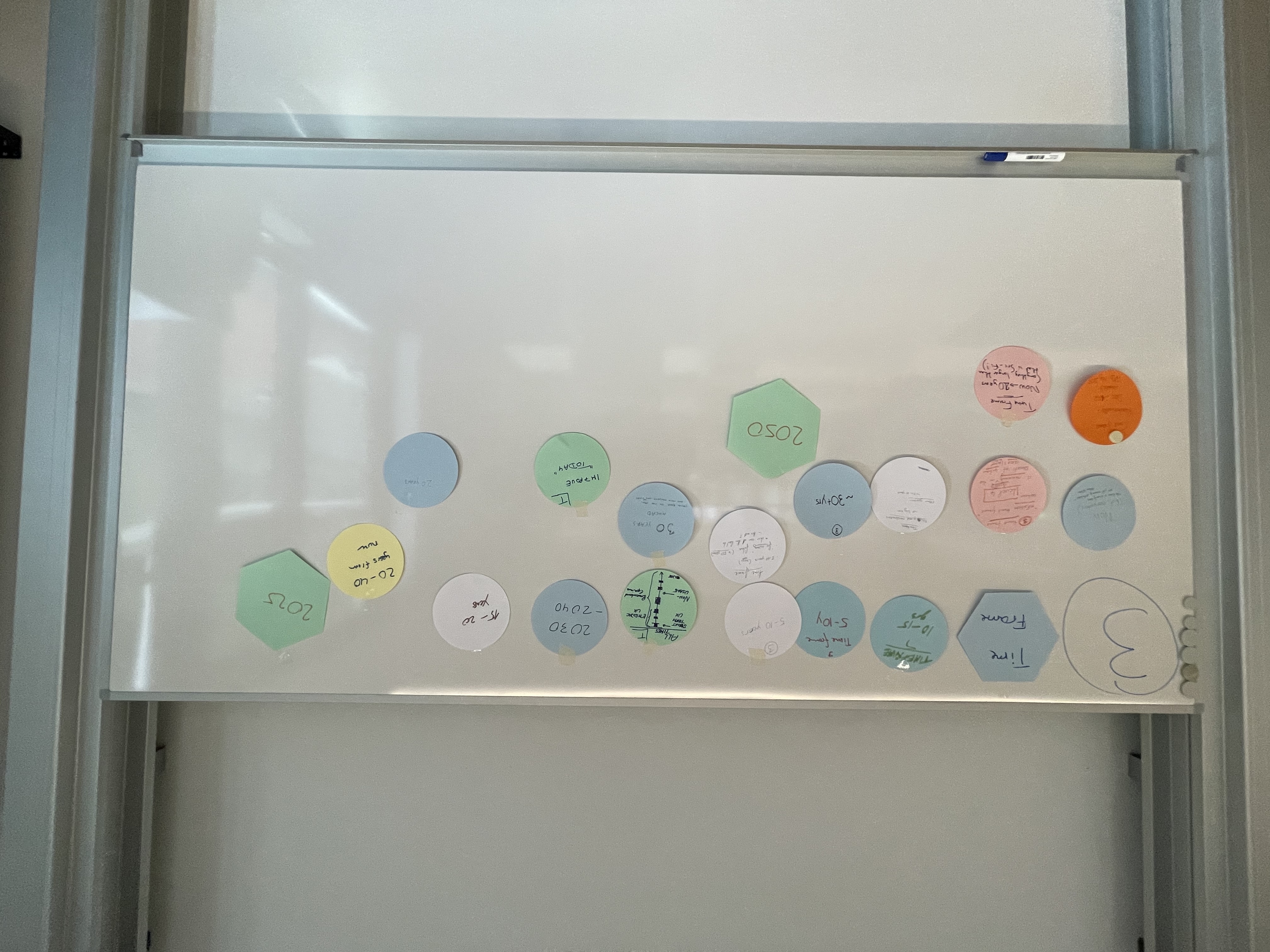
In order to collect uninfluenced interesting topics, open problems, and challenges that the participants would like to discuss more deeply during the week, we started the Dagstuhl seminar on Monday morning (first activity, even before the Introduction, Figure 2) with an open brainstorming session.

For this purpose, the participants were invited to write post-its on the 3 topics of
-
1.
What are you interested in?
-
2.
Which problems do you want to work on in this seminar?
-
3.
Which time frame do we want to set for applications discussed in the seminar?
collect them, present them and stick them on a brainstorming wall (see Figure 3). The seminar organizers later clustered them and derived topics for further activities.
After this warm-up activity, the co-organizers opened the seminar, walked through the agenda, and also gave a little bit of history of Schloss Dagstuhl (see Figure 6).
Next, and in order to get known to the other participants and their interests and goals for the seminar, we used the rest of Monday morning to hear short ignite talks from each participant. In order to better recognize the heterogeneity and diversity of the participants, individual slides from these presentations are shown below (Figure 4, 5). All audience were encouraged to jot down comments, questions, points of interest for the talks and add to the brainstorming wall (see above).




















4.2 Walk and Talk: Mobility of the Future
Bastian Pfleging (TU Bergakademie Freiberg, DE) and Lutz Morich (frE3-innovations, DE)
License: ![]() Creative Commons BY 4.0 International license © Bastian Pfleging, Lutz Morich
Creative Commons BY 4.0 International license © Bastian Pfleging, Lutz Morich
Joint work of: All of the Dagstuhl 22222 participants
As one the goals of the seminar was to think of innovative and groundbreaking visions for future human transportation, the organizers invited all participant to prepare for these topics by a) reflecting on current transportation options and b) envisioning riding in a futuristic, revolutionary vehicle.
Therefore, we asked everyone to find a few minutes during/after the ride to Dagstuhl to think about and reflect about this particular (or a similar) ride and ideate about a future ride to get into the mood for the seminar. In particular, we asked to reflect on the following four questions:
-
What did you enjoy / dislike during this ride?
-
What did you miss during the ride?
-
How would such a ride look like in a revolutionary vehicle? What would it entail?
-
What is needed to overcome the limitations of incremental progress and research to come up with more revolutionary concepts and vehicles?
Taking these stimulating questions as starting point, we took all attendees on a “walk & talk” tour around the seminar venue, similar to sessions in prior Dagstuhl seminars (e.g. https://www.dagstuhl.de/12351). For each segment of the tour, we asked the participants to discuss certain questions in small groups, for instance picking up on the reflection on the pre-arrival questions. After a few minutes, the whole group stopped to share and discuss the mini-group conversations with all participants before we moved on to the next question and walking discussion (in different groups). This lead to creative discussions in changing groups that opened new perspectives and raised awareness of challenges with current mobility solutions. A challenge yet to solve for the next walk & talk session is to find a way to better document all the discussed aspects to have them available for subsequent sessions.
Concrete Discussions
The following paragraphs outline a few of the discussions and perspectives that we captured during the tour.
What is the experience or emotion or motivation of a journey? It is generally more than going from A to B. It is the experience to see beautiful sites, it is time for relaxation or for working and freedom of doing what the person wants to do. It is worth to think of motivations for a journey or commute when designing mobility solutions. Finding an added value to the journey itself is as much as important as fulfilling expectations of the journey. Commuters are expecting some compromises, but if it gets worse as planned, the motivation decreases and the subjective feeling of a negative mobility experience increases.
A discussion on boredom as a resource for creativity, that has become rare in the connected and fast world: Being bored comes from or means not being distracted by anything. By this a human being comes into a state of being oneself. It is rather the state of not being distracted that is the healthy and creative state that the boredom effect. Being not distracted means coming to a calmness and being open and receiving for inspirations.
A discussion on SAE Level 3 / 4 transfer phases, for example falling asleep and waking up to be able to take over responsibilities to drive a vehicle in traffic. Application idea: Using the system information (health data from seat or video sensors to relax the passenger individually perfectly to his/her individual needs and wake him or her the other way up: “Individual relaxing down and waking up” for well being. For liability reasons AV might require redundant confirmation to be ready to drive again– this is crucial from an ethical and legal point of view.
Discussion on seamless transportation experience: Important is a single point of planning and payment. An assistant might help to tell the traveller where to go and what vehicle to take, to receive information of what to expect during the journey, and while planning to inform the traveller and to meet these expectations. E.g.: would a positive customer experience require a transportation provider who gives proposals of alternative routes or vehicles when problems occur during the travelling?
4.3 Monday Movie Night
Andreas Riener (TH Ingolstadt, DE), and Bastian Pfleging (TU Bergakademie Freiberg, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener and Bastian Pfleging
Creative Commons BY 4.0 International license © Andreas Riener and Bastian Pfleging
To stimulate discussions and find sources for inspiration related to mobility aspects, we asked participants before the seminar to collect links to videos that they found inspirational and worth sharing. After dinner on day 1 we met together for the movie night as another activity to get ideas for future mobility concepts based on concept studies, prototypes, research videos, etc. The playlist for the movie night was compiled from our participants’ pre-seminar responses. After watching videos, the concepts were discussed and first ideas for the prototyping sessions of the coming days were brainstormed. The list below shows examples of the videos which participants found particularly inspiring.
-
Robot Fail Compilation! Funniest on the internet, https://youtu.be/iZD7Uuthb0E
-
Example clip from student seminar in Nottopia, https://youtu.be/puktO2g-Wpc
-
The Future of Urban Mobility: an Arup animation, https://youtu.be/_HnLhmXSpUs
-
Mobility 2030: Beyond transportation, https://youtu.be/4B7mZFU2sB4
-
Cities Rise to the Challenge – Sustainable Mobility, https://youtu.be/8Fj2ARn1WMY
-
Doppelmayr/Garaventa - Future Concept Urban (2021), https://youtu.be/bUKgkLSsAWI
-
The next chapter in high-class mobility | The Audi urbansphere concept, https://youtu.be/9pQ9E4k8uck
-
Grandma Freaks Out Self Driving Tesla! Funny Video, https://youtu.be/VvWGtgoTXAg
-
Introducing the self-driving bicycle in the Netherlands, https://youtu.be/LSZPNwZex9s
-
The making of… Introducing the self-driving bicycle in the Netherlands, https://youtu.be/6gOjRqlgk_Y
-
The real T(h)OR: Evaluation of emergency take-over on a test track, https://youtu.be/LokjcYiF10I
-
Notbremsassistent in PKW: Praxistest zeigt grosses Potenzial, aber auch Optimierungsbedarf, https://youtu.be/U4m0sL2RPgA
-
ATHENA: supporting UX of conditionally automated driving with natural language reliability displays, https://youtu.be/RaFYpGRijns
-
Mixed Reality Test Environment MiRE, https://youtu.be/QBfryCB6Dyk
-
The F 015 Luxury in Motion Future City - Mercedes-Benz original, https://youtu.be/SlfpZmCCZ_U
4.4 What could go wrong? Autonomous Vehicle Edition
Wendy Ju (Cornell Tech – New York, US)
License: ![]() Creative Commons BY 4.0 International license © Wendy Ju
Creative Commons BY 4.0 International license © Wendy Ju
Joint work of: Nikolas Martelaro, Ronald Schroeter, Wendy Ju
We introduced the game “What could go wrong? AV edition” to play in the evening at Dagstuhl. The goal of the game was to foster discussions about the potential negative aspects of autonomous cars in hopes of surfacing challenges that should be considered during the design process rather than after deployment. The goal is to consider the autonomous vehicle’s benefits–improving safety, increasing mobility, reducing emissions–against potential drawbacks. By identifying potential harms and downsides, the community more broadly can design radical and innovative mobility solutions.


5 Panel discussions
5.1 Radical Innovation
Wendy Ju (Cornell Tech – New York, US)
License: ![]() Creative Commons BY 4.0 International license © Wendy Ju
Creative Commons BY 4.0 International license © Wendy Ju
Joint work of: Wendy Ju, Virpi Roto, Gary Burnett, Helena Stromberg, Ronald Schroeter
Our first panel was focused on Radical Innovation, and the panelists were Virpi Roto, Gary Burnett, Helena Stromberg and Ronald Schroeter. The panel was structured around three priming questions:
-
What is your craziest idea of what might happen in the space of mobility and automotive interaction?
-
What are ways that you go about exploring radical innovation?
-
How should we act as a community to encourage the “unthinkable”

To the question of the craziest idea that they believed, Roto stated that she believed in “slow traffic.” She believed that AVs will be slow, and that though we talk about hyperloop and fast driving, more realistically AVs would be safest, best and most useful at slower speeds, and hopefully people would be willing to have delays in exchange for not having to have to drive. Burnett argued for color changing cars, and musical cars that could compose music based on how it is being driven– pleasing music when calm, bad driving leads to discord–“Carcophony.” Stromberg said her craziest idea was what she doesn’t want: connected everything and connected people with cars and tech (bionic etc.) Schroeter thought the craziest idea was mobility as a service–how can we actually realize it?–but also offered up the Metaverse as a crazy alternative.
How do you go about methodologically doing things that are innovative? Schroeter stated, that it was helpful to be in an environment that encourages risk-taking. He specifically mentioned the importance of having a multidisciplinary environment. He indicated that it was important to “go back to the roots and identifying what makes sense instead of going to the ‘supermarket of existing methods and grabbing things from the shelves.”’ Stromberg emphasized the importance of going deep and applying the “5 whys” to understand the root cause of issues and then asking in which ways root issues could be resolved. The key mindset to do this: going back to the roots and knowing what we want to achieve. Burnett mentioned looking to science fiction for inspiration. He recognizes that sci-fi is not necessarily always right. Still, fiction can help us identify unconscious requirements as a springboard for radical thinking. Roto indicated that it is critical to start at the right question. What is the starting point for radical design? Most tech solutions start from a problem. She felt it was important to shift this perspective from tech problem to experiential problem.
Shadan Sadeghian Borojeni asked Burnett, “Industry looks at problem oriented approaches. Thinking of sci-fi solutions, nobody thought of efficiency or performance issues, but rather focus only on the hedonic and experiential aspects rather than the pragmatic ones. Is that indeed the right way to go?” Burnett responded, “There are no constraints in sci-fi. Things can “look cool” but the reality of how this actually would work (e.g. gestures in AR – error recovery, workflow, etc.) are not thought about.” Stromberg stated that she personally uses sci-fi or design fictions to provoke ideas. Critical design/ design fiction are tools to determine and ideate where we could or should go rather than to provide as ground requirements.
Burnett reflected that What’s not so radical now was probably radical 15-20 years ago, e.g. GPS/ satnav systems. That was science fiction back then. Lutz Mortiz asked for insights on behalf of those who work in industry how to bring radical sci-fi ideas to life and fruition? Wendy Ju pointed out that the movie Minority Report provided an example of an encapsulation of the research in that was then taking place at MIT Media lab. The fiction made the research a reality.
To the question, “How should we encourage the community to embrace this kind of radical thinking?” Schroeter recommended Stephen Johnson’s book, Where good ideas come from. We are too strict as an academic research community in accepting novel and radical ideas. Thought-provoking concept or ideas even in position papers are often rejected. This can be addressed by cutting it some slack to papers presenting novel ideas even if they are deficient in other aspects. Burnett advocated being resilient and flexible to different scenarios. Bastian Pfleging suggested that we rethink conference venues, to make late breaking work more futuristic instead of being an outlet for rejected papers. Roto concluded the session by indicating that we can best encourage radical thinking by embracing multidisciplinary approaches.
5.2 Underrepresented users, accessibility, novel users
Andreas Riener (TH Ingolstadt, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener
Creative Commons BY 4.0 International license © Andreas Riener
Joint work of: Andreas Riener, Nik Martelaro, Regina Bernhaupt, Andreas Löcken, Mark Colley
Designing mobility for the future requires in particular to look at underrepresented user groups, such as disabled people and populations with (any) accessibility problem. Lutz Morich has brought the problem in the open discussion to the point: “Current practice is designing to the 5% woman and the 95% man. The spotlight is going where the money is. How do we design for small populations? (not yet). It is way cheaper to reduce the options radically (such as Tesla does) to reduce complexity in factories and maximize profit. For manufacturer it needs to be economically affordable to do the variance… An example that worked quit well: SUVs were designed for older people to be able to get in more easily and sit elevated; however, the design language is different – it doesn’t look like a senior vehicle…?”.
In the course of the panel session the following triggering questions were discussed.
-
1.
What new user groups can automated driving open up?
-
2.
What would be prerequisites for a successful integration into future transport?
-
3.
What accessibility problems are currently present in private/public transport?
-
4.
What would be a radical innovation for blind people in future mobility?
-
5.
How to ensure all people have access to future mobility?
-
6.
Can remote operation help to compensate for physical or sensory disabilities?
In the following, only part of the question-answers are exemplary summarized. As for the first question “What new user groups can automated driving open up?”, panelists responded:
-
Andreas Loecken: Elderly people in rural areas. That is common. I’m not convinced. I like to think about people who have cognitive disabilities, because we don’t often think about how to make the car easy to operate.
-
Nikolas Martelaro: I’ll echo that the people with cognitive difficulties, who usually have a caretaker, so an AV can open up independence. There are also people who have sensory disabilities: people who are blind, for example. One of the low vision people asked to have an autonomous motorcycle or convertible – funny because we often think of AVs as pods-because they would like to have the joy of driving, the physical sensation.
-
Mark Colley: We often think about getting people from A to B. The people who are blind do not have a problem, they have support of the government because they can get a cab, they can talk to the cab driver. They plan their trips days in advance, know where they want to be, so they don’t want to go someplace spontaneously, so they say they are skeptical and don’t want it. But! We need to think about the whole journey, the cab driver comes to the door, they take them by the hand, they take the luggage. So there’s a lot that the cab driver does that needs to be done. Automakers do not see that as a valid business case, it’s far far away. Have not seen many scenarios of people with a variety of disabilities. People will need situation awareness. Apple has an app to help people walk around. There is the one paper on the last mile problem, also there is the first mile problem.
-
Regina Bernhaupt: I think we should design the other way around. Yes we can design for the next user group and splitting them up, look at motor groups, look at adaptation potential. Design for inclusivity in the first place. For example, design for Regina, because she is too small for a typical car. By designing for all the people, by putting it on top of what is already doing, and additionally serving the groups, we will reach out further to the next one. For example, if you design a remote control for the people who are blind, that would make it a better design for everyone, and if it is haptic, it helps everyone. Sometimes these things are a hard sell in industry. So change the perspective, accessibility is for everyone.
More questions were discussed, also including the perspective of other seminar participants, leading to the final question to the panelists: “Which accessibility problem would you like to solve first of accessibility?” (one sentence)
-
Andreas Loecken would like to give companies monetary incentives to steer the change process towards holistic, seemless transportation.
-
Nik Martelaro wants more people from different backgrounds agency to be designers, to be on the design team.
-
Mark Colley was intrigued by the idea of radically changing the design process itself, i.e., use tools to make it cheaper for companies to include this aspect.
-
Regina Bernhaupt pointed out that for a person which is blind, maybe give them the butler, not an autonomous vehicle. Don’t put technology first, keep it for later…

References
- [1] Andreas Löcken and Philipp Wintersberger and Anna-Katharina Frison and Andreas Riener. Investigating User Requirements for Communication Between Automated Vehicles and Vulnerable Road Users. 2019 IEEE Intelligent Vehicles Symposium, IV 2019, Paris, France, pp. 879–884, June 9-12, 2019.
5.3 Teaching of Design Methods
Andreas Riener (TH Ingolstadt, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener
Creative Commons BY 4.0 International license © Andreas Riener
We further wanted to use the seminar as an opportunity to communicate new design and usability evaluation methods. This activity was also organized as a community event – seminar participants could suggest methods that they find particularly innovative and profitable and that they would be willing to communicate to interested parties in a short session (15 min. to 90 min.) prior to arrival. Feedback was clustered and finally offered in 8 small groups on Monday afternoon and Tuesday morning (each seminar participant could participate in several activities). Here is an overview of idea generators and topics.
-
Teach Design Methods, part I (Monday, 14.00-15.30 hrs)
-
1.
Virpi Roto: Experience goal-driven design (90 min.)
-
2.
David Sirkin: Collecting field data (from passers-by) (90 min.)
-
3.
Gary Burnett: VR to run design workshops (90 min.)
-
1.
-
Teach Design Methods, part II (Tuesday, 9.00-10.30 hrs)
-
1.
Nikolas Martelaro: Remote Wizard of Oz methods (for automotive interaction) (60 min.)
-
2.
Andreas Riener: User Enactments as a Design Method (60 min.)
-
3.
Regina Bernhaupt: Design-thinking workshop (60 min.)
-
4.
from 10.00AM (for everybody) David Goedicke: Driving Simulator Demo
-
5.
from 10.15AM Ronald Schroeter and Nik Martelero: What could go wrong? An interactive card game (two groups)
-
1.

5.4 World Cafe: Discussions of major themes in the community
Wendy Ju (Cornell Tech – New York, US)
License: ![]() Creative Commons BY 4.0 International license © Wendy Ju
Creative Commons BY 4.0 International license © Wendy Ju
Joint work of: All of the Dagstuhl 22222 participants
For the World Cafe event, we had people brainstorm topics they wanted to talk about with the entire group, and then grouped these. From the groupings, three main topics were selected.
Nik Martelaro, Shadan Sadeghian Borojeni and Regina Bernhaupt lead each of these themes. The test of the team broke into three groups, which rotated through each theme discussion. From this, we created a shared group sentiment on the area, interesting research questions and desired outcomes.
Nikolas Martelaro’s theme focused on Personalized Design for Future Mobility. The advent of new forms of vehicles which could have modular blocks would make it possible to adapt for users who had different abilities, people who are on extremes of the human factor sizes, and families, who might have dogs or children. The modularity would make it possible to have reconfiguration for long trips or off-roading. Key questions are who is legally liable for manufacturing and safety validation for each vehicle?
Shadan led the discussion for new models and paradigms for interacting with automation. The research questions stemming from this area were:
-
RQ1: what are the needs for new models and paradigms? Potential answers were, new control schemes, new relations, expectation management/mental models, and responsibility management.
-
RQ2: what are the implications of different models and paradigms for identity and for breakdowns in interaction.
-
RQ3: How do we convey roles and responsibilities in changing levels of automation?
-
RQ4: How acceptable are the defined roles for different users?
-
RQ5: How to keep up with fast updates of car?
-
RQ6: How do different interaction paradigms shape emerging mobility experiences?
Regina led a discussion of reinventing the automotive experience. The key stakeholders in this were the government, users and technology providers. The government is responsible for thinking about the economic impacts of mobility, the public health implications, and sustainability. The technology providers are thinking about the physical, emergent and virtual aspects of mobility technology. Users, on the other hand, are thinking about self-efficacy, user experience and their personal values. Interaction between technology and users is largely around automation and mobility services. Interaction between the government and technology companies have to do with policy and standards. And the government interacts with users through training and licensure. Key ideas in the arena have to do with improving self-efficacy for individual users, groups and community, having virtual butlers who can help individuals to customize their transportation, and visions of post-car transportation from the technology providers.
6 Prototyping Activities
6.1 Video Prototyping as a Way to Explore Radical Innovation
Wendy Ju (Cornell Tech – New York, US)
License: ![]() Creative Commons BY 4.0 International license © Wendy Ju
Creative Commons BY 4.0 International license © Wendy Ju
Video prototyping is a valuable tool that enables better exploration of scenarios, interactions, context, timing and experiences. The video outcomes can also support reflection and analysis, reinterpretation, and form the basis for collaboration.
On Wednesday morning in the workshop, I introduced the method in a presentation, providing several examples of video prototyping from my own research in automotive interaction and human-robot interaction design, and then presented some ideas of how video prototypes could be made.
We then broke into three groups and worked on brainstorming, quick and dirty prototyping, and putting together video prototypes. The activities culminate in three different videos from each of the three groups.

6.2 Video Prototype: Radical Innovations in Future Mobility and Virtual Assistants
Kai Holländer (LMU München, DE), Gary Burnett (University of Nottingham, GB), Wendy Ju (Cornell Tech – New York, US), Natasha Merat (University of Leeds, GB), Lutz Morich (frE3-innovations, DE), Virpi Hannele Roto (Aalto University, FI), Ronald Schroeter (Queensland University of Technology – Brisbane, AU), and David Sirkin (Stanford University, US)
License: ![]() Creative Commons BY 4.0 International license © Kai Holländer, Gary Burnett, Wendy Ju, Natasha Merat, Lutz Morich, Virpi Hannele Roto, Ronald Schroeter, and David Sirkin
Creative Commons BY 4.0 International license © Kai Holländer, Gary Burnett, Wendy Ju, Natasha Merat, Lutz Morich, Virpi Hannele Roto, Ronald Schroeter, and David Sirkin
For the future of mobility it will be important to empower individuals in the selection of climate friendly and seamless interaction of different means of transport. In this work we present a video which shows an example use case of a virtual agent which helps a user to figure out the best transportation options for a specific individual journey. The virtual agent is in a dialogue with the user and can help to optimize selecting means of transportation which suit the purpose of the trip, optimize for the best possible occupancy rate of the suggested vehicles, the lowest energy consumption as well as costs, and account for special needs if a user has limitations of any sort.
This video was accepted to the videos track in AutoUI 2022, https://dl.acm.org/doi/fullHtml/10.1145/3544999.3551501.
6.3 Video Prototype: How to Manage Social Order in Shared Automated Vehicles
Nikolas Martelaro (Carnegie Mellon University – Pittsburgh, US), Jonas Andersson (RISE Research Institutes of Sweden – Göteborg, SE), Gary Burnett (University of Nottingham, GB), Debargha Dey (TU Eindhoven, NL), Andreas Löcken (TH Ingolstadt, DE), and Helena K. Strömberg (Chalmers University of Technology – Göteborg, SE)
License: ![]() Creative Commons BY 4.0 International license © Nikolas Martelaro, Jonas Andersson, Gary Burnett, Debargha Dey, Andreas Löcken, and Helena K. Strömberg
Creative Commons BY 4.0 International license © Nikolas Martelaro, Jonas Andersson, Gary Burnett, Debargha Dey, Andreas Löcken, and Helena K. Strömberg
Autonomous shared ride vehicles may be prone to similar social issues and non-ideal passenger behaviors as today’s public transit. Such issues may include passengers littering, harassing others, and creating an environment that is generally unpleasant for riders. Transportation user experience designers should preemptively consider such scenarios early in their design work to help develop possible interfaces to manage social order and maintain good rider experience. Through a short video prototype, we present three possible non-ideal scenarios that may occur on shared autonomous shuttles and provide three potential solutions to begin a discussion around how to design for such non-ideal situations.
This video was accepted to the Videos track at AutoUI 2022, https://dl.acm.org/doi/abs/10.1145/3544999.3550154.
6.4 Video Prototype: A Critical Perspective on Radically Innovating Personal Mobility
Regina Bernhaupt (TU Eindhoven, NL), Mark Colley (Universität Ulm, DE), David Goedicke (Cornell Tech – New York, US), Alexander Meschtscherjakov (Universität Salzburg, AT), Bastian Pfleging (TU Bergakademie Freiberg, DE), Andreas Riener (TH Ingolstadt, DE), Shadan Sadeghian Borojeni (Universität Siegen, DE)
License: ![]() Creative Commons BY 4.0 International license © Regina Bernhaupt, Mark Colley, David Goedicke, Alexander Meschtscherjakov, Bastian Pfleging, Andreas Riener, and Shadan Sadeghian
Creative Commons BY 4.0 International license © Regina Bernhaupt, Mark Colley, David Goedicke, Alexander Meschtscherjakov, Bastian Pfleging, Andreas Riener, and Shadan Sadeghian
Automotive research today is mostly concerned with incremental improvement. With an automated vehicle in mind, increased safety, reduced fuel consumption, and the possibility of non-driving-related activities are anticipated. However, the challenges of future mobility require a critical rethinking of mobility in its entirety, including the availability of personalized and motorized mobility. With this video, we want to stimulate discussions on more radical innovation in mobility. In detail, we want the audience to imagine what challenges a world without individually driven cars would pose.
This video was accepted to the videos track at AutoUI 2022, https://dl.acm.org/doi/abs/10.1145/3544999.3551689.
7 Conclusion
7.1 Commitments and Future Plans
Wendy Ju (Cornell Tech, US)
License: ![]() Creative Commons BY 4.0 International license © Wendy Ju
Creative Commons BY 4.0 International license © Wendy Ju
Before the seminar closed, we had participants go around and make commitments for actions they planned to take following the workshop.
-
Each of the video prototyping groups pledged to submit their videos to the AutoUI video track.
-
There was also a commitment to incorporate the methods learned across the workshop in the curriculum at everyone’s respective universities.
-
There were discussions to create workshops or birds-of-a-feather sessions around accessibility in AVs, alternatives to vehicles, and micro-mobility at CHI.
-
David Goedicke offered to share his virtual reality driving simulation platform with people who were interested in collaborating to use that platform to prototype alternative visions for transportation.
-
Wendy Ju made plans to host Debargha Dey and Mark Colley at Cornell Tech for post-doctoral research and visiting researcher positions, respectively.
-
Andreas Riener and Ronald Schroeter have agreed to submit a DAAD proposal to allow a PhD student to visit Prof. Riener’s group to foster cooperation and scientific exchange. Furthermore, Schroeter and Riener have been discussing a long-term research visit and residency of Andreas Riener at CARRS-Q, in the frame of a sabbatical for several years now, which was delayed through COVID. Within seminar 22222, the planning of future exchanges that will deepen the engagement between the two institutions and staff was taken-up again.
7.2 Post-seminar Travel Experiences by Participants
Andreas Riener (TH Ingolstadt, DE)
License: ![]() Creative Commons BY 4.0 International license © Andreas Riener
Creative Commons BY 4.0 International license © Andreas Riener
Our seminar finished Friday, June 3rd at lunchtime. Most of the participants left Dagstuhl at around the same time. Using a WhatsApp group, we tracked everybody’s travel experience back home. From the report below (see Figure 12) it can be very easily seen that individual car travel still seems to be the most convenient and relaxed way to reach home on-time. Traveling via plane to different places in Europe and even US lasts almost the same time then using a train within Germany… Plenty of opportunities to improve future mobility… ;-)
Acknowledgements.
We would like to thank all participants of the Dagstuhl Seminar 22222 for their input on this spontaneous activity.
8 Participants
-
Jonas Andersson – RISE Research Institutes of Sweden – Göteborg, SE
-
Regina Bernhaupt – TU Eindhoven, NL
-
Gary Burnett – University of Nottingham, GB
-
Mark Colley – Universität Ulm, DE
-
Debargha Dey – TU Eindhoven, NL
-
David Goedicke – Cornell Tech – New York, US
-
Kai Holländer – LMU München, DE
-
Wendy Ju – Cornell Tech – New York, US
-
Andreas Löcken – TH Ingolstadt, DE
-
Nikolas Martelaro – Carnegie Mellon University – Pittsburgh, US
-
Nathasha Merat – University of Leeds, GB
-
Alexander Meschtscherjakov – Universität Salzburg, AT
-
Lutz Morich – frE3-innovations, DE
-
Bastian Pfleging – TU Bergakademie Freiberg, DE
-
Andreas Riener – TH Ingolstadt, DE
-
Virpi Hannele Roto – Aalto University, FI
-
Shadan Sadeghian Borojeni – Universität Siegen, DE
-
Ronald Schroeter – Queensland University of Technology – Brisbane, AU
-
David Sirkin – Stanford University, US
-
Helena K. Strömberg – Chalmers University of Technology – Göteborg, SE
![[Uncaptioned image]](22222.jpg)